





























7. OBJECT LIBRARY
7 - 16
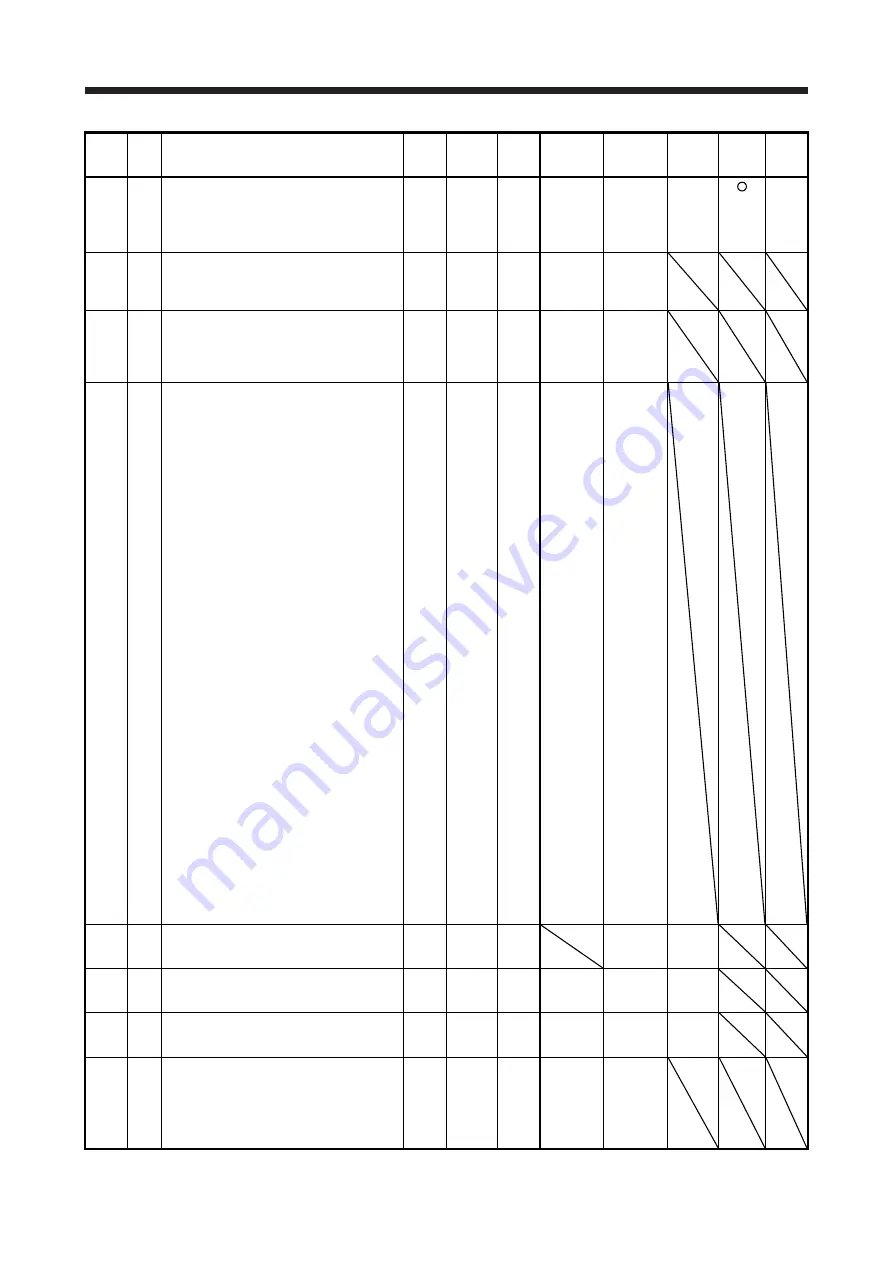
Index
Sub
Index
Name and function
Data
type
Read/
write
Variable
mapping
Initial value
Range
Unit
Saved
to EEP-
ROM
Para-
meter
60E1
0
Reverse rotation torque limit (Negative torque
limit value)
The reverse rotation torque limit can be read.
The reverse rotation torque limit can also be set.
Set a reverse torque limit value in units of 0.1%.
2
bytes
Read/
write
Possible 10000 0000h
to
2710h
(10000)
0.1%
PA12/
(PA11)
60E3
0
Supported homing method (Supported homing
method)
The number of supported homing methods is
returned.
1
bytes
Reading Impos-
sible
39
00h to FFh
60E3 1
to
39
Number specification of supported homing
methods (1st to 39th) (1st supported homing
method)
Set the number of the supported home position
return type.
1
bytes
Reading Impos-
sible
37
80h to 7Fh
60F2
0
Profile position mode setting (Positioning option
code)
Set the profile position mode.
Bit 1 to Bit 3 always notify "0". Setting a value
other than "0" will cause an error.
[Bit 1/Bit 0: relative option]
How to handle the relative position command
during pp is specified.
00: The positioning is performed with the relative
position from the internal absolute target
position.
[Bit 3/Bit 2: change immediately option]
The operation of when change set immediately
(control word Bit 5) is 1 during pp is specified.
00: Normal pp mode operation (New Target
position, profile velocity, acceleration, and
others are reflected immediately.)
[Bit 7/Bit 6: rotary axis direction option]
Specify the operation of the rotation axis during
pp and pt.
00: The servo motor rotates to the target position
in a direction specified with a sign of the
position data.
01: The servo motor rotates in the address
decreasing direction regardless of the sign of
the position data.
10: The servo motor rotates in the address
increasing direction regardless of the sign of
the position data.
11: The servo motor rotates from the current
position to the target position in the shorter
direction. If the distances from the current
position to the target position are the same
for CCW and CW, the servo motor rotates in
the CCW direction.
2
bytes
Read/
write
Possible 0000h 0000h
to
00C0h
60F4
0
Droop pulses [command unit] (Following error
actual value)
The droop pulses are returned.
4
bytes
Read Possible
80000000h
to
7FFFFFFFh
pos
units
60FA
0
Speed command (Control effort)
The speed command is returned.
4
bytes
Read Possible
0
80000000h
to
7FFFFFFFh
0.01
r/min
60FF
0
Command speed (Target velocity)
Set the speed command used in the profile
velocity mode (pv).
4
bytes
Read/
write
Possible 0 80000000h
to
7FFFFFFFh
0.01
r/min
6502
0
Supported control mode (Supported drive modes)
The supported control mode is returned.
Bit 0: Profile position mode (pp)
Bit 2: Profile velocity mode (pv)
Bit 3: Profile torque mode (tq)
Bit 5: Homing mode (hm)
4
bytes
Reading Possible 0000002Dh 0000002Dh
to
0000002Dh
Содержание MR-JE series
Страница 9: ...A 8 MEMO...
Страница 21: ...2 CC Link IE FIELD NETWORK BASIC PROTOCOL 2 4 MEMO...
Страница 39: ...5 PARAMETERS 5 8 MEMO...
Страница 45: ...6 MANUFACTURER FUNCTIONS 6 6 MEMO...
Страница 89: ...7 OBJECT LIBRARY 7 44 MEMO...
Страница 91: ...MEMO...







































































