





























Setup
Connections
maxon motor control
EPOS4 Positioning Controller
Document ID: rel6852
3-47
EPOS4 50/5 Hardware Reference
Edition: May 2017
© 2017 maxon motor. Subject to change without prior notice.
3.3.11
CAN 1 (X11) & CAN 2 (X12)
The EPOS4 is specially designed being commanded and controlled via a Controller Area Network
(CAN), a highly efficient data bus very common in all fields of automation and motion control. It is prefer-
ably used as a slave node in the CANopen network.
For the CAN configuration
“DIP Switch Configuration (SW1)” on page 3-54.
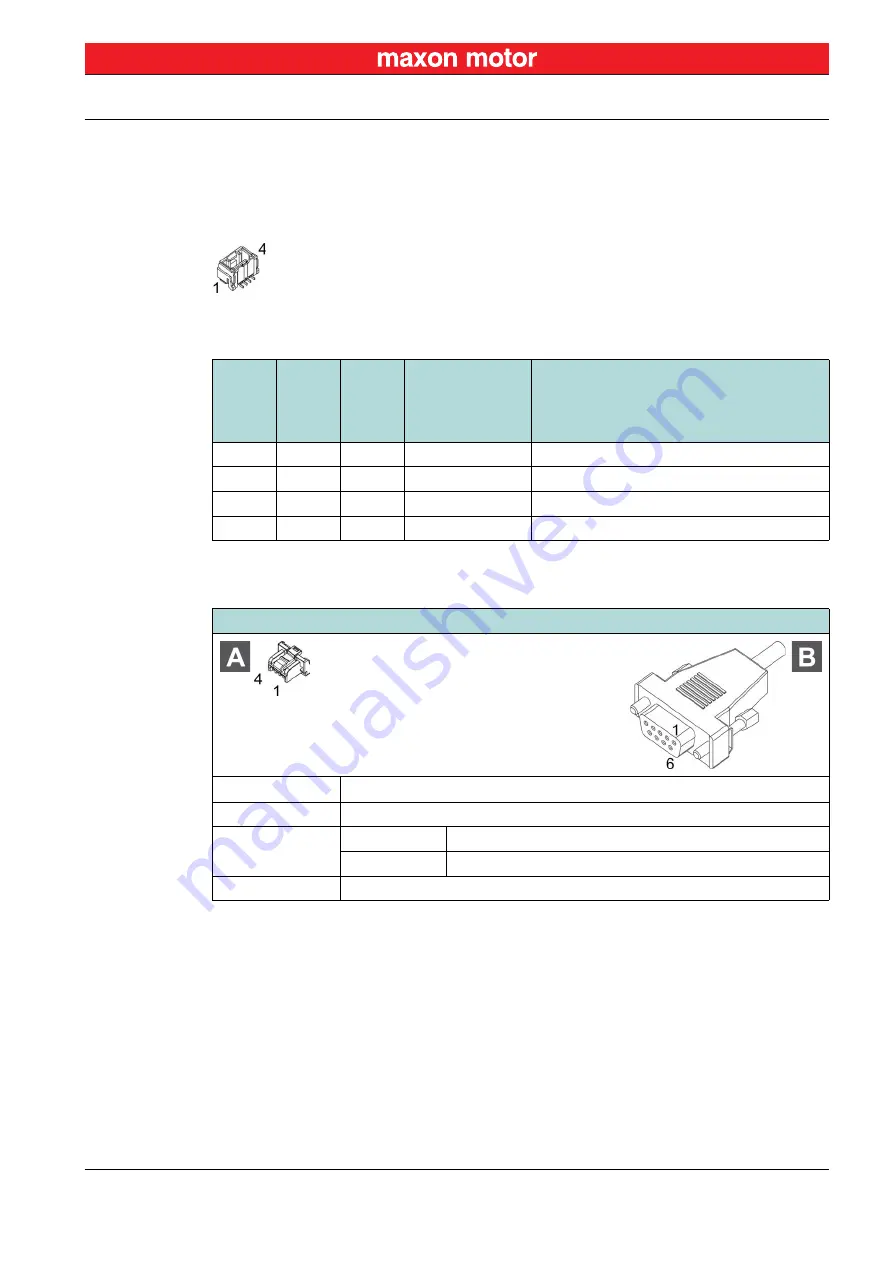
Figure 3-39
CAN 1 connector X11 and CAN 2 connector X12
Table 3-32
CAN 1 connector X11/CAN 2 connector X12 – Pin assignment
Table 3-33
CAN-COM Cable
Continued on next page.
X11
X12
Head A
Prefab
Cable
Head B
Signal
Description
Pin
Color
Pin
1
white
7
CAN high
CAN high bus line
2
brown
2
CAN low
CAN low bus line
3
green
3
GND
Ground
4
Shield
5
Shield
Cable shield
CAN-COM Cable (520857)
Cross-section
2 x 2 x 0.14 mm
2
, twisted pair, shielded
Length
3 m
Head A
Plug
Molex CLIK-Mate, single row, 4 poles (502578-0400)
Contacts
Molex CLIK-Mate crimp terminals (502579)
Head B
Female D-Sub connector DIN 41652, 9 poles, with mounting screws







































































