





























Gocator Line Profile Sensors - User Manual
Gocator Web Interface • Measurement • 164
Measurement Tools
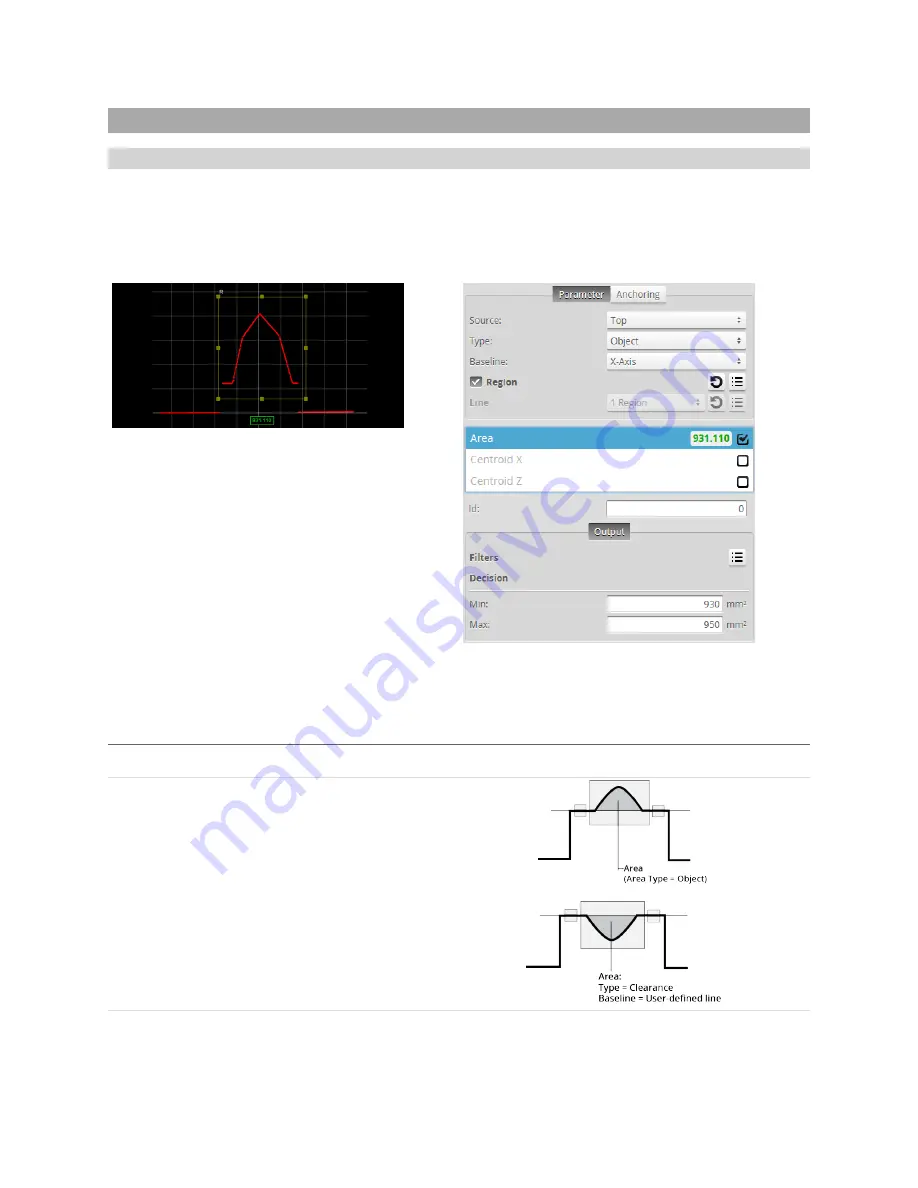
Area
The Area tool determines the cross-sectional area within a region. Gocator compares the measurement
value with the values in
Min
and
Max
to yield a decision. For more information on decisions, see
on page 151 for instructions on how to add measurement tools.
Areas are positive in regions where the profile is above the X axis. In contrast, areas are negative in
regions where the profile is below the X axis.
Measurement
Illustration
Area
Measures the cross-sectional area within a region that is
above or below a fitted baseline.
Measurements
Содержание Gocator 2100 Series
Страница 10: ...Gocator Line Profile Sensors User Manual 10 Return Policy 515 Software Licenses 516 Support 522 Contact 523 ...
Страница 193: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 193 2D View 3D View Measurement Panel ...
Страница 197: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 197 ...
Страница 209: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 209 2D View 3D View ...
Страница 214: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 214 2D View 3D View ...
Страница 215: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 215 ...
Страница 225: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 225 2D View 3D View ...
Страница 462: ...Gocator Line Profile Sensors User Manual Specifications Sensors 462 Dimensions Envelope ...
Страница 464: ...Gocator Line Profile Sensors User Manual Specifications Sensors 464 Envelope ...
Страница 466: ...Gocator Line Profile Sensors User Manual Specifications Sensors 466 Dimensions Envelope ...
Страница 468: ...Gocator Line Profile Sensors User Manual Specifications Sensors 468 Dimensions Envelope ...
Страница 470: ...Gocator Line Profile Sensors User Manual Specifications Sensors 470 Dimensions ...
Страница 471: ...Gocator Line Profile Sensors User Manual Specifications Sensors 471 Envelope ...
Страница 473: ...Gocator Line Profile Sensors User Manual Specifications Sensors 473 Dimensions ...
Страница 474: ...Gocator Line Profile Sensors User Manual Specifications Sensors 474 Envelope ...
Страница 476: ...Gocator Line Profile Sensors User Manual Specifications Sensors 476 Dimensions ...
Страница 477: ...Gocator Line Profile Sensors User Manual Specifications Sensors 477 Envelope ...
Страница 479: ...Gocator Line Profile Sensors User Manual Specifications Sensors 479 Dimensions ...
Страница 480: ...Gocator Line Profile Sensors User Manual Specifications Sensors 480 Envelope ...
Страница 484: ...Gocator Line Profile Sensors User Manual Specifications Sensors 484 Dimensions ...
Страница 485: ...Gocator Line Profile Sensors User Manual Specifications Sensors 485 Envelope ...
Страница 487: ...Gocator Line Profile Sensors User Manual Specifications Sensors 487 Dimensions ...
Страница 488: ...Gocator Line Profile Sensors User Manual Specifications Sensors 488 Envelope ...
Страница 491: ...Gocator Line Profile Sensors User Manual Specifications Sensors 491 Dimensions ...
Страница 492: ...Gocator Line Profile Sensors User Manual Specifications Sensors 492 Envelope ...
Страница 506: ...Gocator Line Profile Sensors User Manual Specifications Master Hubs 506 Master 810 Dimensions ...
Страница 512: ...Gocator Line Profile Sensors User Manual Specifications Master Hubs 512 Master 2410 Dimensions ...







































































