





























Gocator Line Profile Sensors - User Manual
Gocator Web Interface • Measurement • 221
Measurement Panel
Measurement
Illustration
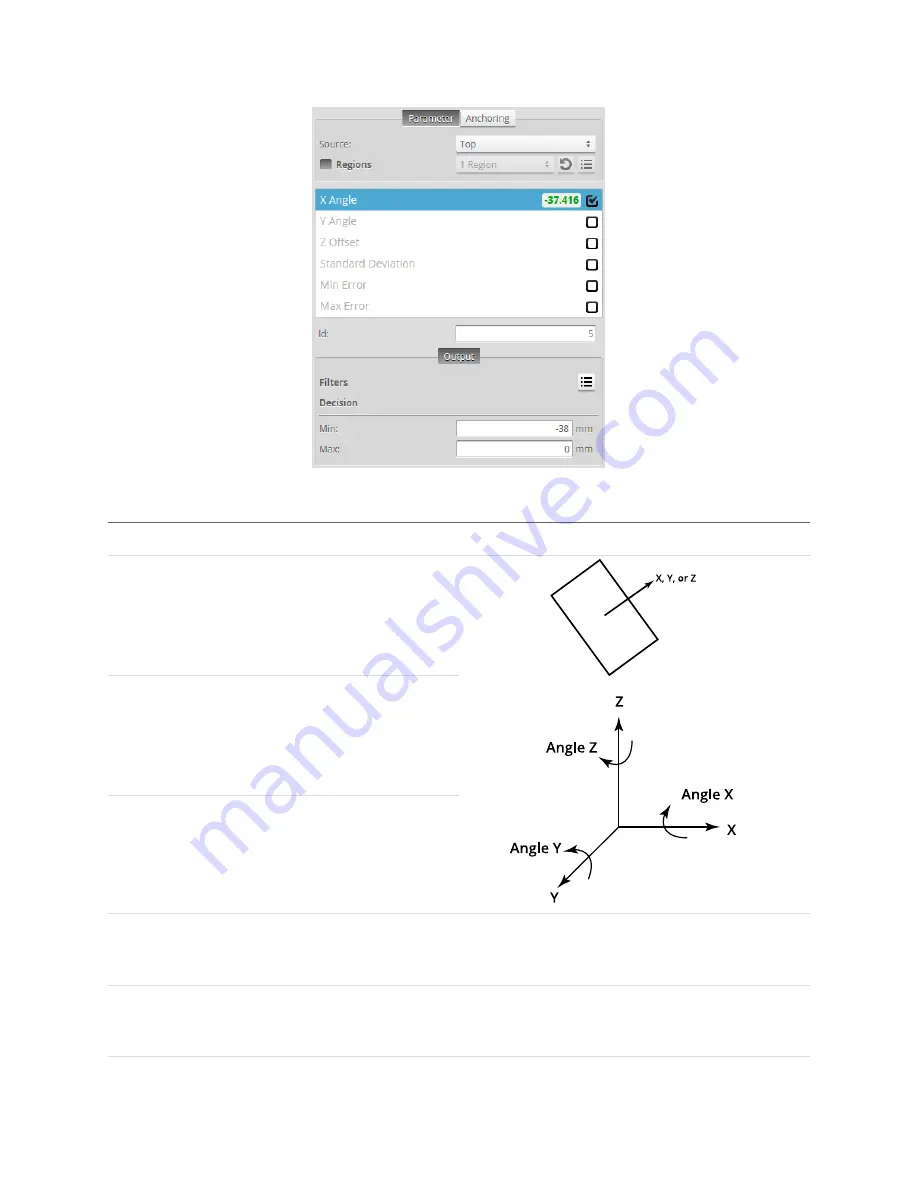
Angle X
Determines the X angle of the surface with respect to the
alignment target.
Angle Y
Determines the Y angle of the surface with respect to the
alignment target.
Offset Z
Determines the Z offset of the surface with respect to the
alignment target.
Standard Deviation
Measures the standard deviation of the points of the
surface from the detected plane.
Min Error
Measures the minimum error from the detected plane (the
maximum distance below the plane).
Measurements
Содержание Gocator 2100 Series
Страница 10: ...Gocator Line Profile Sensors User Manual 10 Return Policy 515 Software Licenses 516 Support 522 Contact 523 ...
Страница 193: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 193 2D View 3D View Measurement Panel ...
Страница 197: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 197 ...
Страница 209: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 209 2D View 3D View ...
Страница 214: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 214 2D View 3D View ...
Страница 215: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 215 ...
Страница 225: ...Gocator Line Profile Sensors User Manual Gocator Web Interface Measurement 225 2D View 3D View ...
Страница 462: ...Gocator Line Profile Sensors User Manual Specifications Sensors 462 Dimensions Envelope ...
Страница 464: ...Gocator Line Profile Sensors User Manual Specifications Sensors 464 Envelope ...
Страница 466: ...Gocator Line Profile Sensors User Manual Specifications Sensors 466 Dimensions Envelope ...
Страница 468: ...Gocator Line Profile Sensors User Manual Specifications Sensors 468 Dimensions Envelope ...
Страница 470: ...Gocator Line Profile Sensors User Manual Specifications Sensors 470 Dimensions ...
Страница 471: ...Gocator Line Profile Sensors User Manual Specifications Sensors 471 Envelope ...
Страница 473: ...Gocator Line Profile Sensors User Manual Specifications Sensors 473 Dimensions ...
Страница 474: ...Gocator Line Profile Sensors User Manual Specifications Sensors 474 Envelope ...
Страница 476: ...Gocator Line Profile Sensors User Manual Specifications Sensors 476 Dimensions ...
Страница 477: ...Gocator Line Profile Sensors User Manual Specifications Sensors 477 Envelope ...
Страница 479: ...Gocator Line Profile Sensors User Manual Specifications Sensors 479 Dimensions ...
Страница 480: ...Gocator Line Profile Sensors User Manual Specifications Sensors 480 Envelope ...
Страница 484: ...Gocator Line Profile Sensors User Manual Specifications Sensors 484 Dimensions ...
Страница 485: ...Gocator Line Profile Sensors User Manual Specifications Sensors 485 Envelope ...
Страница 487: ...Gocator Line Profile Sensors User Manual Specifications Sensors 487 Dimensions ...
Страница 488: ...Gocator Line Profile Sensors User Manual Specifications Sensors 488 Envelope ...
Страница 491: ...Gocator Line Profile Sensors User Manual Specifications Sensors 491 Dimensions ...
Страница 492: ...Gocator Line Profile Sensors User Manual Specifications Sensors 492 Envelope ...
Страница 506: ...Gocator Line Profile Sensors User Manual Specifications Master Hubs 506 Master 810 Dimensions ...
Страница 512: ...Gocator Line Profile Sensors User Manual Specifications Master Hubs 512 Master 2410 Dimensions ...





















































