
























21
6.0 WOC-2 MODBUS CONTROL OPERATION
6.1 General Description
This document provides the basic operational description for the Modbus RS-485 communications
port. The WOC-2 supports the Modbus Protocol as specified in the Modicon Technical publications
“Modbus Protocol” (intr7.html). The WOC-2 control does not support the Broadcast mode. The
controller provides the slave side communications routines for the RTU mode. The user must
define the Slave ID to a unique ID number from 1 – 15. Default Baud rate is 19.2 K baud, No Parity,
one stop bit. The WOC-2 can be used to control CWT slides or other types of stepper Motor driven
slides that use a 2 phase motor with current rating of 1.5 - 6.5 amps/phase.
6.1 Initialization of WOC-2 from Power up
When power is applied to the WOC-2 the Motor drive is disabled and the default configuration is
loaded. To activate the Motor drive the follow sequence should be used.
1. Connect suitable host Modbus controller to the RS-485 Comm port and establish
communications with the Modus Slave device.
2. Set the Modus Master device to Read 20 Holding Register (Command 0x03)
starting at Address 0. This will load the current configuration from the WOC-2
Slave.
3. Set the Modbus Master to read 16 coils (Command 0x01, address 0) starting at
address 0. This loads the WOC-2 coils status.
4. If the slide being used has a CCW limit then set Coil 10 (address 9) using command
0x05 or 0x15. This will enable the Motor Drive and set the WOC-2 motor drive to
the CCW direction. When the slide reaches the CCW limit the drive will halt the
motion then move slowly in CW direction until the slide move off the CCW limit.
The MSC will set the current Positon REG[6] to 1 and the COIL 10 will be cleared.
6.2 Move Slide to Position after initialization
Once the Slide has been initialized the user can move the slide to a specific position by writing a
speed value to REG[1] (Command 0x06 address 0) then writing a new position into REG[8]
(Command 0x06 address 7). The WOC-2 will determine the direction of rotation by comparing the
current position to the new Move position. During the move COIL 2 will be set. When the move is
complete COIL 2 will be cleared. The user must wait until the move has completed before a new
position can be loaded into REG7. To change the move speed write the new speed to REG[1]
(Command 0x06 address 0). The speed can be written during a move to position command. Use
the following sequence to move the slide to specific location
1. Write Motor speed to REG1 (address 0)
2. Write Slide position to REG[8] (address 7)
3. Wait for Move complete by checking COIL[2](address1). If COIL[2] = 0 then the
move is complete.
Содержание CWT WOC-2
Страница 2: ......
Страница 9: ......
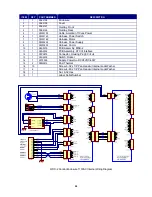
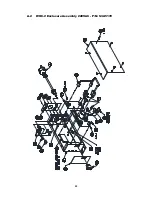
Страница 32: ...23 APPENDIX A SYSTEM DRAWINGS A 1 WOC 2 Enclosure Assembly 110VAC P N S3A5171...
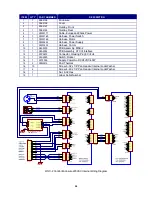
Страница 34: ...25 A 2 WOC 2 Enclosure Assembly 220VAC P N S3A5172...
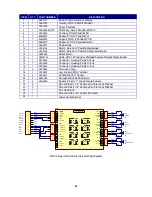
Страница 36: ...27 A 3 WOC 2 Operator Pendant P N E3A5069...
Страница 40: ......





















































