Lenze AC Tech SMVector, Справочное руководство
"Lenze SMVector - это компактный частотный преобразователь, предназначенный для управления и контроля двигателей. Для более подробной информации и настройки устройства, вы можете бесплатно скачать Руководство по эксплуатации с нашего сайта. Посетите manualshive.com уже сегодня и загрузите свой экземпляр."
Поделиться
Скачать
















Отзывы:
Нет отзывов
Похожие инструкции для SMVector
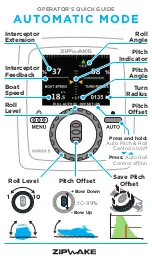
E Series
Бренд: zipwake Страницы: 2

E Series
Бренд: zipwake Страницы: 2

CT1
Бренд: B&K Страницы: 12

Echo
Бренд: unios Страницы: 2

RT60
Бренд: Qu-Bit Electronix Страницы: 15

QR-25 Series
Бренд: Quincy Страницы: 31

Lyme FIA Sofia 2
Бренд: Quidel Страницы: 49

Versailles
Бренд: Quest Leisure Products Страницы: 12

LED Street Bar 16x3W RGB IP65
Бренд: Varytec Страницы: 9

VL1600 PROFILE
Бренд: VARILITE Страницы: 8

EVENTPROFILE VL800
Бренд: Vari Lite Страницы: 34

Optica 30 Series
Бренд: Varex Imaging Страницы: 36

Perfusor Space
Бренд: B. Braun Страницы: 40

Perfusor Space
Бренд: B. Braun Страницы: 4

KF-1067
Бренд: Onwa Страницы: 35

BK130
Бренд: Phenix Technologies Страницы: 39

ARGO G60
Бренд: Triton Страницы: 31
5-90197
Бренд: Xtricity Страницы: 4





















































