







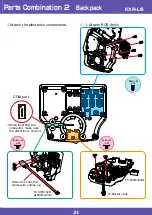





















37
Connection with PC 3
HTH4 (HeartToHeart4) is used to adjust the robot. The software is exclusively for RCB-4HV/RCB-4mini
(referred to as “RCB-4” below) and has been designed to make it easy for anyone to control the robot.
Using this software allows you to make full use of the functions needed to freely operate the robot,
including the neutral position check (checks that parts have been assembled correctly with the servos
in the origin (neutral) position), basic positioning adjustment (trim adjustment), motion creation, sensor
settings, etc.
■ Install HeartToHeart4 Software
To install the software, double-click the "setup.exe" in the HeartToHeart4 folder in the CD-ROM
included with the kit to automatically run the setup program. Continue the installation process as
instructed by the setup program.
1. Software Installation
After completing the software installation, click the “HeartToHeart4” icon in the Windows Start Menu
or on the Desktop to run the software.
When running HeartToHeart4 for the first time, a HeartToHeart4 folder is created in the My Document
folder of your personal computer. Project files created must be saved in the “Projects" sub-folder in
this folder.
2. Software Activation
Connect the Serial Extension Cable to the Dual USB Adapter HS, and connect the other end to the
port connector at the top of the KXR backpack.
3. Connecting Dual USB Adapter HS to the Robot
Dual USB Adapter HS
Serial Extension Cable
PC
1.5m
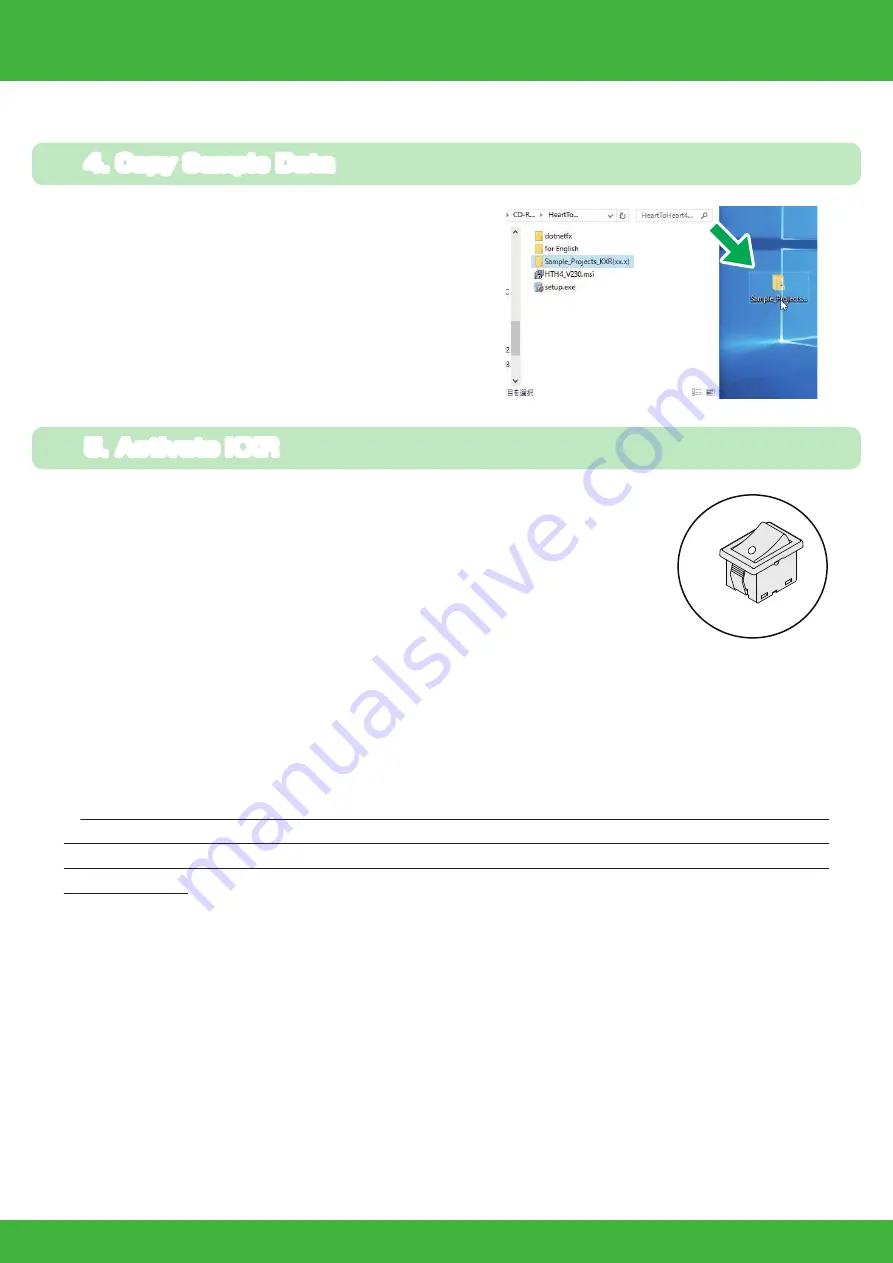
Copy the “Sample_Projects_KXR
(
Vxx.x
)
" in
the HeartToHeart4 folder on the CD-ROM to a con-
venient location on your personal computer.
In the example, it is copied to the desktop.
*The version number differs depending on
the kit and included CD-ROM.
When the power is turned on, all the servos will light up and then some of the
servos will go out. The remaining servos will be lit up somewhat dimly. The robot
will not move until you load the project (motion data) and run it, but this is its
normal state.
*Servos with LEDs that turn on and off differ depending on the servo layout of the project example.
4. Copy Sample Data
Turn the KXR power switch ON.
5. Activate KXR
[IMPORTANT]
• Check the RCB-4 wiring and each servo motor once again be-
foreturning the power ON.
• Turning the power ON with connectors out of alignment, or
the polarities reversed, may cause damage to the robot.
• If you notice anything abnormal when the power is on, such as a strange odor or a
hot servo motor, immediately turn off the power and remove the battery.
[IMPORTANT]
● Always turn the power switch to OFF when temporarily away from the robot.
● When you are going to be away for a longer period of time, remove
the battery connector for safety.
● Confirm that the battery is adequately charged before starting the robot.
ON
*If the battery is not adequately charged when starting the robot,
it may hinder subsequent operations.