



























29
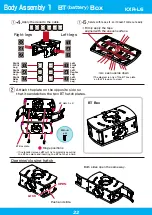
Parts Combination 1
Legs
M3 ー 6
x6
120mm
A
C
Legs Layout
2.6 ー 4
M2.6 ー 10
Right
Legs
Left
Legs
M2 ー 6
Uper arm 3300-20 x6
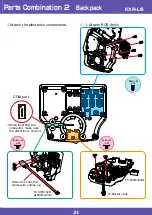
Parts combination
◯Upper arm 3300-20 x6
◯Cable guide X x6
◯Body x1(Assembled)
◯Leg x6(Assembled)
◯M2 ー 6 x6
◯M2.6 ー 10 x6
◯M3 ー 6 x6
◯2.6 ー 4 x6
◯ZH Connection cable 2
120mm x6
■
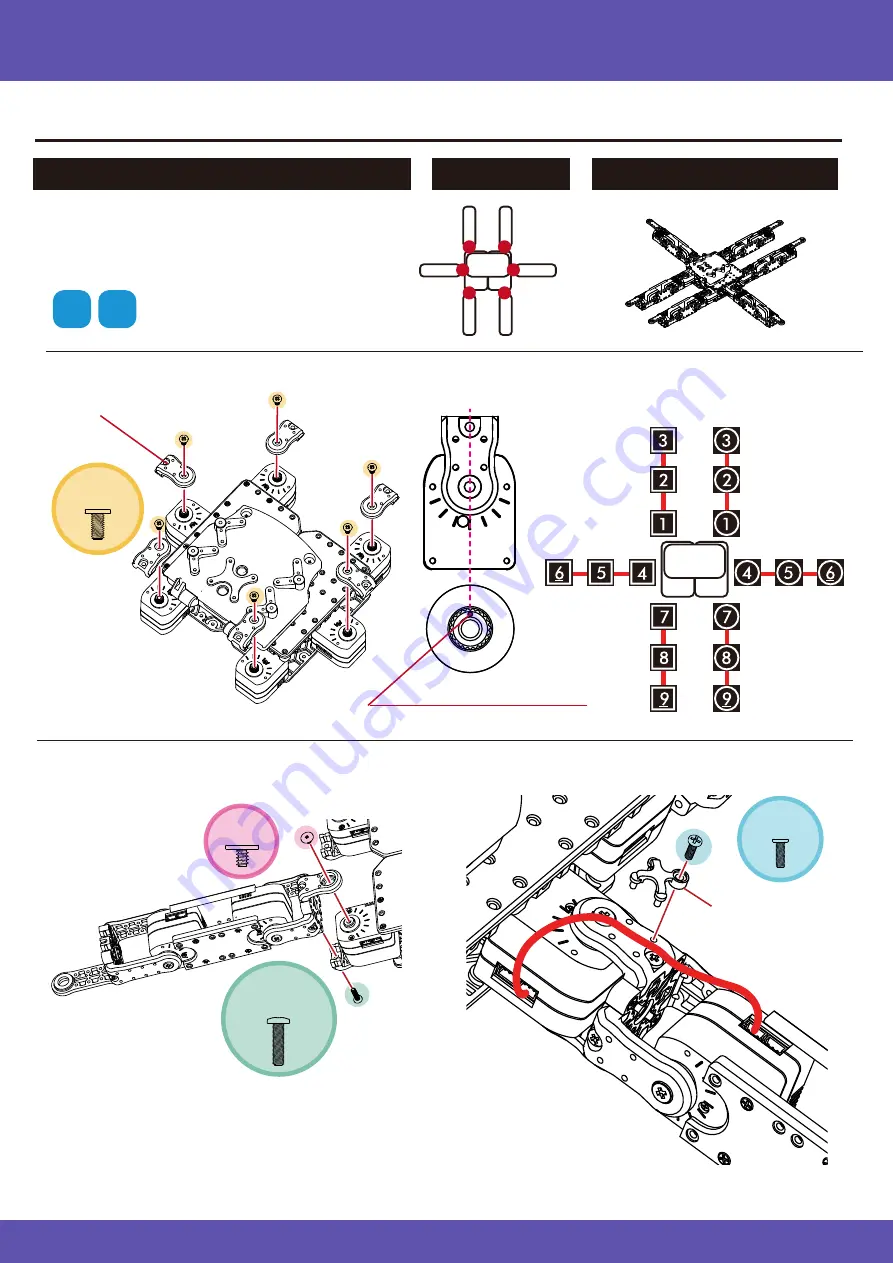
Attach the legs.
Cable guide X
*For the cable, whichever connector
is used, it has no effect on operations,
but make sure the cable does not overlap.
Attach the six legs to the body.
Assemble part
Assembly parts completed
Parts used
*Confirm the servo origin
and attach it straight.
①
Attach the upper arm to the body servo.
②
Attach the six legs to the body.
③
Attach six cables.
KXR-L6

































































