





























17
Setting Servo IDs 2
● Changing Servo ID Settings
1. Copy the Serial Manager folder in the
KXR folder with the set onto the PC
desktop.
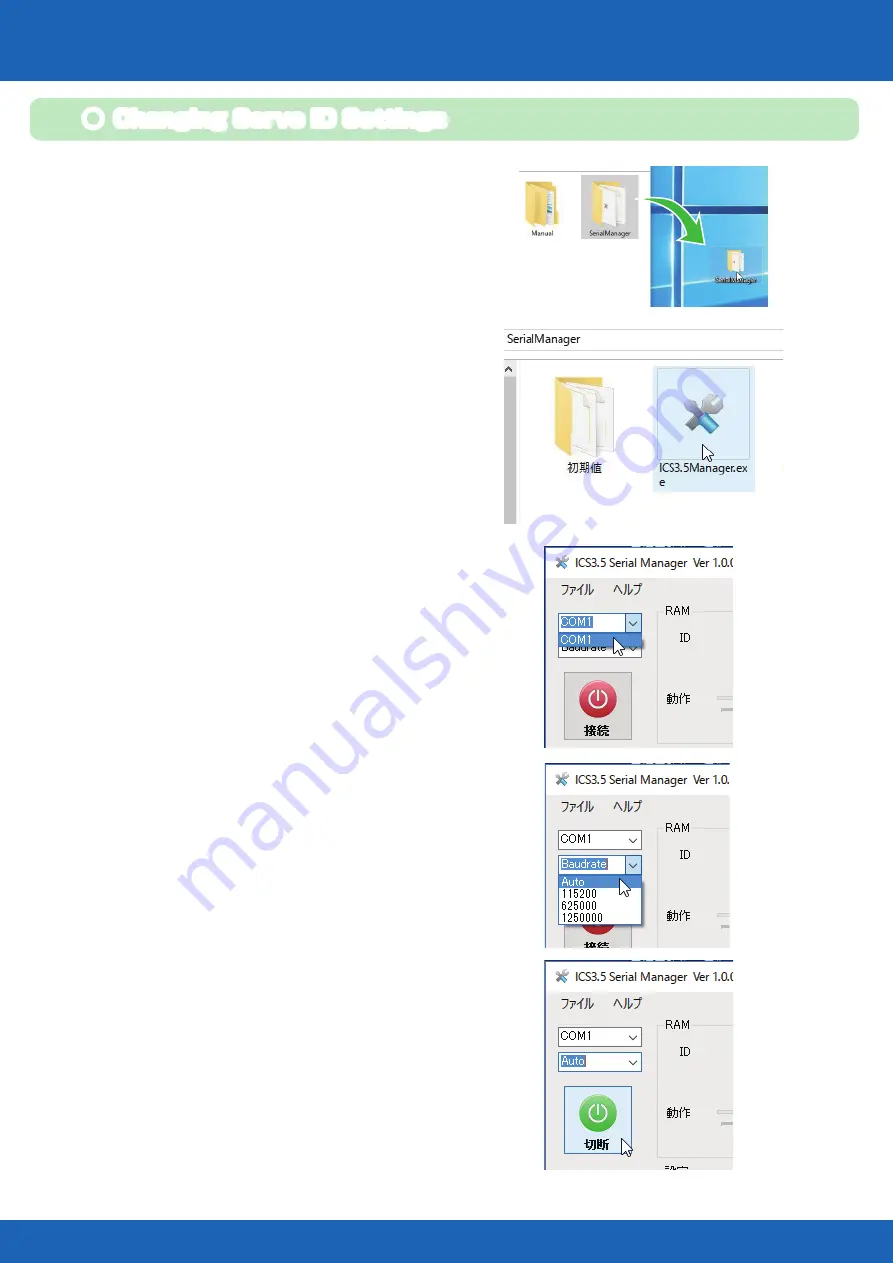
2. Double-click ICS3.5Manager.exe in the
copied Serial Manager folder and launch
ICS3.5Serial Manager. ICS3.5Serial
Manager allows you to change settings
f o r I C S 3 . 5 / 3 . 6 - s p e c . s e r v o I D s ,
rotational mode and various parameters.
3. Select the COM number confirmed
above in Dual USB Adaptor HS COM
Confirmation. In the image, COM 1 is
selected, but the COM number differs
depending on the computer you use, so
always select the confirmed number.
4. Set the speed for servo communica-
tions. If you select Auto, it will auto-
matically connect in line with the com-
munication speed.
When the communication speed is
selected (KRS-3302 ICS at factory
s h i p m e n t i s 1 1 5 2 0 0 ) a n d t h e
C o n n e c t b u t t o n c h a n g e s t o
Disconnect, the process is complete.
When the connection is complete, the
IDs will automatically switch based on
the servos.
The 〇 and ▢ mark on the ID sticker is
unrelated to the ID, so confirm only the
number.
KXR-L4N
Содержание KXR-L4N
Страница 34: ...34 Head Assembly 1 Gripper M2 6 ー 10 Joint frame 3300A Joint frame 3300A Gripper M2 6 ー 10 KXR L4N ...
Страница 36: ...36 Head Assembly 2 Join M2 6 ー 10 M2 ー 6 x4 Botom arm 3300 38 Cable guide X 2 6 ー 4 Head 200mm KXR L4N ...
Страница 42: ...42 Complete Assembly completed KXR L4N ...
Страница 65: ......