













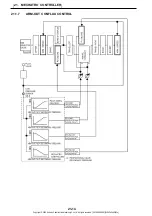









(1) Positive control
1.
On starting any one of operations, pilot secondary pressure switches each spool and is input to
each low pressure sensor.
2.
The output voltage of low pressure sensor is input to mechatro controller and the mechatro
controller processes pilot signal and outputs command according to the input voltage to each
unload pressure proportional valve.
3.
Each pump proportional valve outputs pilot secondary pressure according to the command output
by mechatro controller and changes the tilting angle of each pump and controls the delivery rate.
4.
With this operation, the delivery rate according to lever manipulated movement is fed to the
actuator, and consequently the working speed according to the lever manipulated movement will be
obtained.
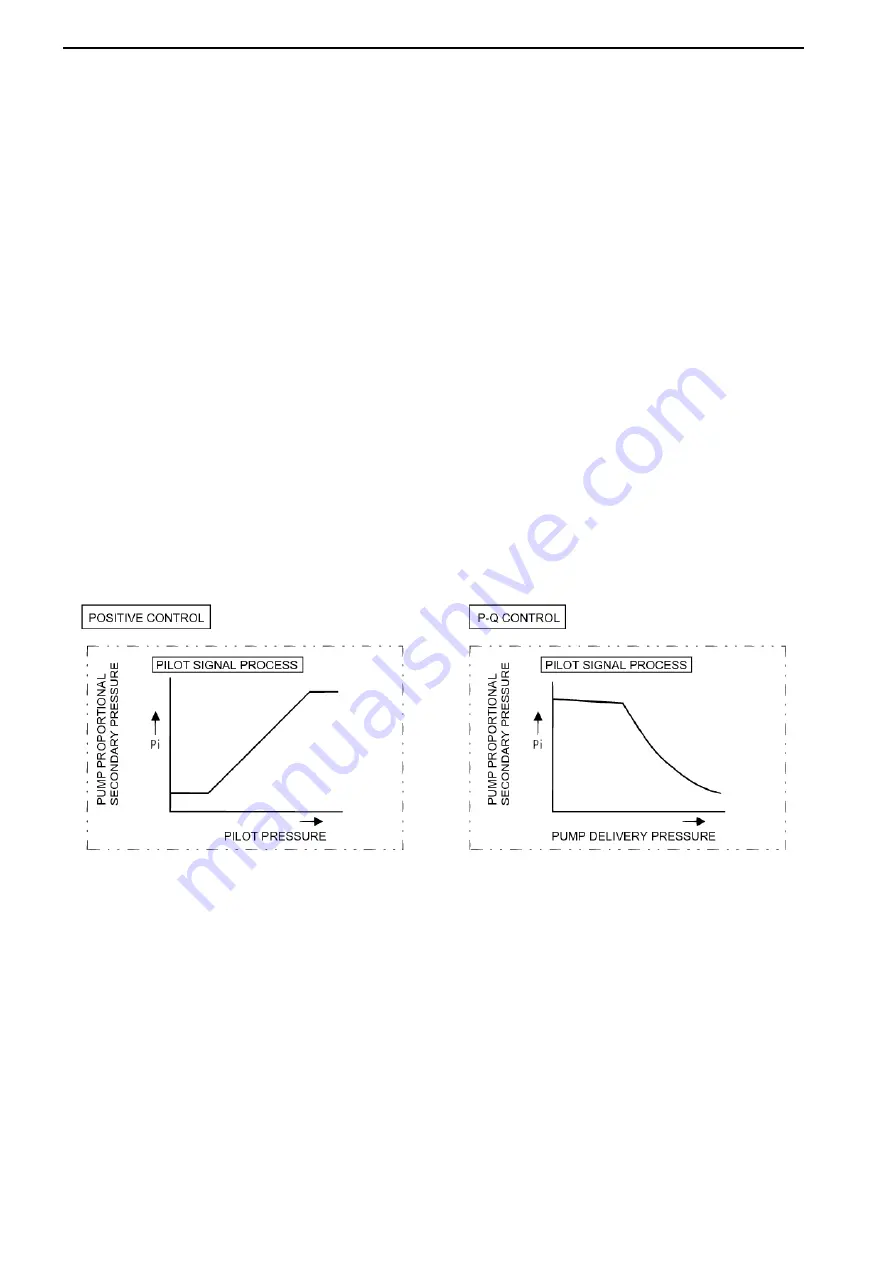
(2) P-Q control
(1) The output voltage of high pressure sensor provided on each pump line is input to mechatro
controller and the mechatro controller processes pilot signal and operates the command according
to the input voltage (load pressure).
(2) The lower value between command values calculated by positive control and operated value
found by P-Q control {operated value found in item 1)} is selected and is output to each pump
proportional valve as command value.
(3) Each pump proportional valve outputs pilot secondary pressure according to the command output
by mechatro controller and changes tilting angle of each pump and controls the delivery rate.
(4) With this operation, the delivery rate according to lever manipulated movement is fed to actuator
and consequently working speed will be obtained according to lever movement.
[
21. MECHATRO CONTROLLER
]
21-8
Copyright © 2015 Kobelco Construction Machinery Co.,Ltd. All rights reserved. [S5YN0046E03] [0109CsCshWbYs]