



























21
PRODUcT DEScRIPTION
2.5.2 Selection of the servo controller
The selection of the servo controller occurs via the max. short time current limit and the
output rated current.
Max. short time
current =
M
Lmax
• Stall current (
I
0
)
––––––––––––––––––––––––––––––––––
Stall torque (
M
0
)
Output rated
current =
effective torque (
M
eff
) • Stall current (
I
0
)
––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Stall torque (
M
0
)
2.5.3 Output component
The smallest possible effective circular diameter of the output component can be calcu-
lated as follows:
D
W
=
k
* 2 *
M
b
D
W
k
F
Rm
M
b
effective circular diameter of the output components
Pretension factor
permissible lateral force
acceleration torque of the drive
–––––––––––
F
Rm
2.5.4 Pretension factor
Empirical values for the pretension factor
k
:
Pinion
k
≈
1.5
Toothed belt
1.2…2.0
Flat belt
2.2…3.0
For dynamic processes like braking and accelerating, the permissible lateral force
F
R
is
not to be exceeded in order to avoid a mechanical destruction of the motor.
2.6 Safety function
The fault exclusion of a detaching encoder securement according to
:2008 can be applied for the DL3 motors with resolver.
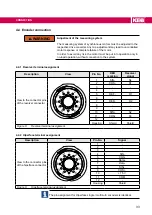
ATTENTION
The fault exclusion for motors with safety technology is only valid under
the following conditions:
►
The FS logo is printed on the nameplate.
Содержание DYNAMIC LINE III
Страница 2: ......
Страница 12: ...12 Standards forasynchronousand synchronous motors ...
Страница 58: ...58 NOTES ...







































































