


























20
PRODUcT DEScRIPTION
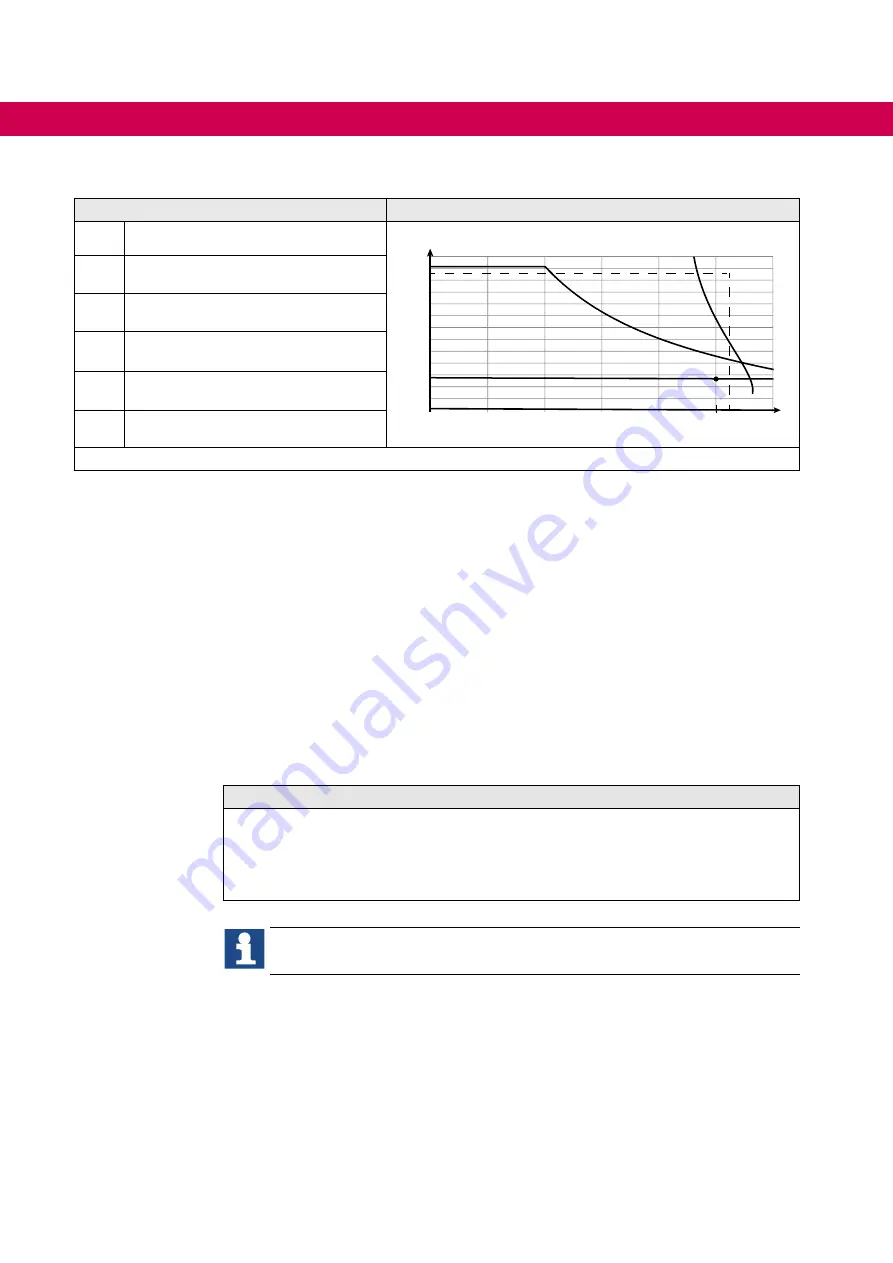
2.4 General speed-torque characteristic
Definition
characteristic
M
0
Stall torque (n=0)
M
max
M
0
n
N
n
max
n
M
S1
M
N
U
DC
M
max
max. torque
M
N
Rated torque
n
N
Rated speed
n
max
max. speed
U
DC
DC link voltage
Figure 1:
General speed-torque characteristic
2.5 General project design
2.5.1 Selection of the servo motor
Calculate the following values before you selection the servo motor:
• Determine inertia (
J
App
) of the application without motor.
• Calculate required peak torque (
M
Lmax
) of the application at the drive. The inertia
of the motor (
J
Mot
) can be accepted here with 1/5 inertia (
J
App
) of the application.
• Determine the effective torque (
M
eff
) via the time.
Now the motor can be selected on the basis of the calculated values and the technical
data of the following pages. The following selection features must be observed:
calculated data of the application
Motor data
Maximum speed of the application (
n
max
)
≤
Rated motor speed (
n
N
)
required peak torque (
M
Lmax
)
≤
Maximum torque (
M
max
)
Effective torque (
M
eff
)
≤
Rated torque (
M
N
)
Inertia of the application (
J
App
)
/ 10
≤
Motor torque (
J
mot
)
For examination or optimization it can be calculated again with the real motor
data.
Содержание DYNAMIC LINE III
Страница 2: ......
Страница 12: ...12 Standards forasynchronousand synchronous motors ...
Страница 58: ...58 NOTES ...







































































