





























40
| Optidrive ODP-2 Solar Pump User Guide |
Version 2.04
www.invertekdrives.com
These parameters will often provide enough functions to allow the user to complete basic commissioning in simple applications. The
parameters are described in more detail below.
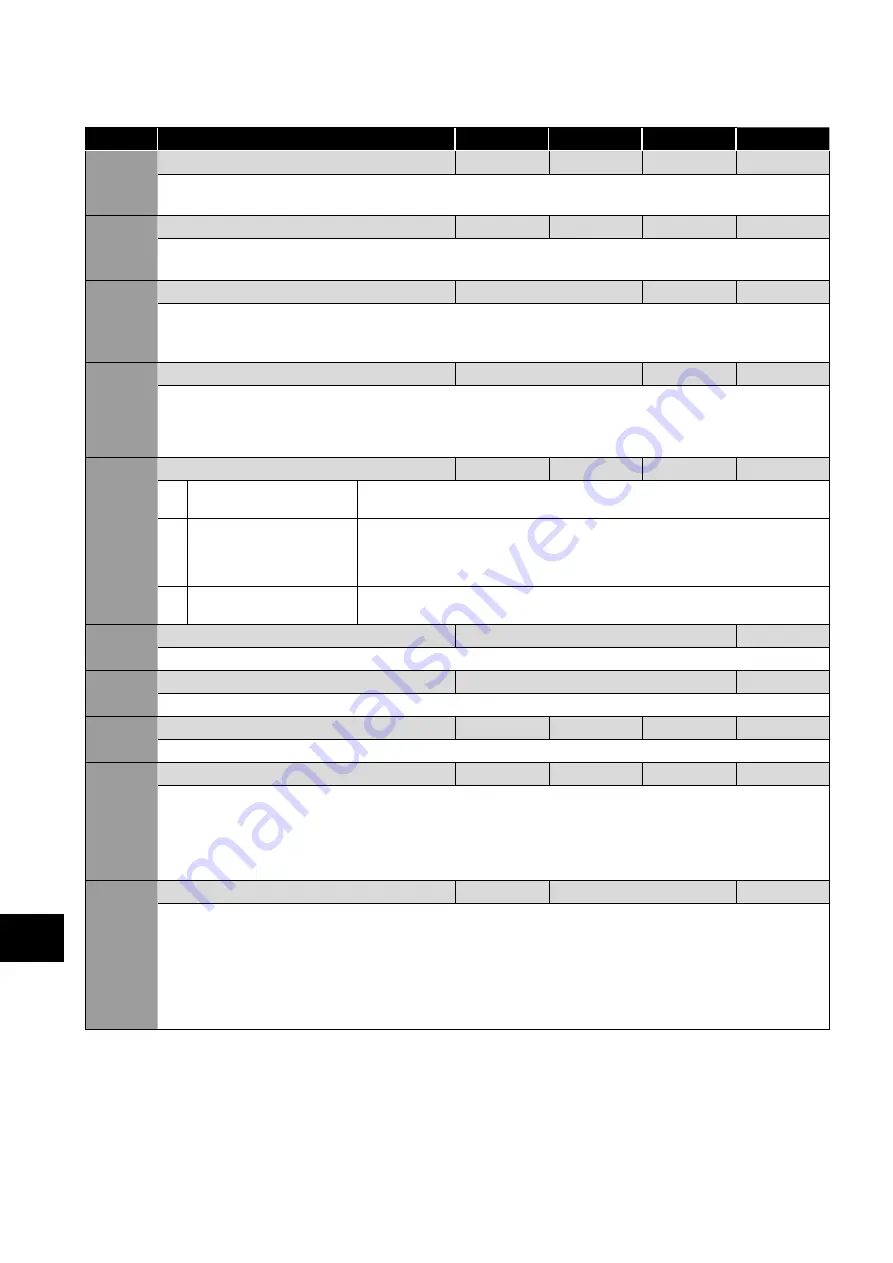
Par.
Description
Minimum
Maximum
Default
Units
P1-01
Maximum Frequency / Speed Limit
P1-02
500.0
50.0 (60.0)
Hz / Rpm
Maximum output frequency or motor speed limit – Hz or rpm.
If P1-10 >0, the value entered / displayed is in Rpm.
P1-02
Minimum Frequency / Speed Limit
0.0
P1-01
0.0
Hz / Rpm
Minimum speed limit – Hz or rpm.
If P1-10 >0, the value entered / displayed is in Rpm.
P1-03
Acceleration Ramp Time
See Below
5.0 / 10.0
Seconds
Acceleration ramp time from 0 to base speed (P1-09) in seconds.
FS2 & FS3 : 5.0 Seconds Default Setting, 0.01 Seconds Resolution, 600.0 Seconds Maximum.
FS4 – FS7 : 10.0 Seconds Default Setting, 0.1 Seconds Resolution, 6000 Seconds Maximum.
P1-04
Deceleration Ramp Time
See Below
5.0 / 10.0
Seconds
Deceleration ramp time from base speed (P1-09) to standstill in seconds. When set to zero, fastest possible ramp time without trip is
activated.
FS2 & FS3 : 5.0 Seconds Default Setting, 0.01 Seconds Resolution, 600.0 Seconds Maximum.
FS4 – FS7 : 10.0 Seconds Default Setting, 0.1 Seconds Resolution, 6000.0 Seconds Maximum.
P1-05
Stop Mode
0
2
0
-
0
Ramp
When the enable signal is removed, the drive will ramp to stop, with the rate controlled by
P1-04 as described above. In this mode, the drive brake transistor (where fitted) is disabled.
1
Coast
When the enable signal is removed, the drive output is immediately disabled, and the motor
will coast (freewheel) to stop. If the load can continue to rotate due to inertia, and the drive
may possibly be re-enabled whilst the motor is still rotating, the spin start function (P2-26)
should be enabled. In this mode, the drive brake transistor (where fitted) is disabled.
2
AC Flux Braking
As Option 0, but additionally, AC Flux braking is used to increase the available braking
torque.
P1-07
Motor Rated Voltage / kE
Drive Rating Dependent
Volts
This parameter should be set to the rated (nameplate) voltage of the motor.
P1-08
Motor Rated Current
Drive Rating Dependent
Amps
This parameter should be set to the rated (nameplate) current of the motor.
P1-09
Motor Rated Frequency
10
500
50 (60)
Hz
This parameter should be set to the rated (nameplate) frequency of the motor.
P1-10
Motor Rated Speed
0
30000
0
RPM
This parameter can optionally be set to the rated (nameplate) rpm of the motor. When set to the default value of zero, all speed
related parameters are displayed in Hz, and the slip compensation for the motor is disabled. Entering the value from the motor
nameplate enables the slip compensation function, and the Optidrive display will now show motor speed in estimated rpm. All
speed related parameters, such as Minimum and Maximum Speed, Preset Speeds etc. will also be displayed in Rpm.
NOTE
This parameter can be left as 0rpm and the drive will display speed in units of Hz (electrical frequency). If setting this value
to provide speed information in rpm, ensure that the value is correct for the electrical frequency entered in P1-09.
P1-11
Torque Boost
0.0
Drive Rating Dependent
%
Torque Boost is used to increase the applied motor voltage and hence current at low output frequencies. This can improve low
speed and starting torque. Increasing the boost level will increase motor current at low speed, which may result in the motor
temperature rising - force ventilation of the motor may then be required. In general, the lower the motor power, the higher the boost
setting that may be safely used.
For IM motors, a suitable setting can usually be found by operating the motor under very low or no load conditions at
approximately 5Hz, and adjusting P1-11 until the motor current is approximately the magnetising current.
This parameter is also effective when using alternative motor types, P4-01 = 3, 4 or 5. In this case, the boost current level is defined
as 4 x P1-11 x P1-08.
7
Full P
arameter List







































































