MK59xx
Cylinder sensor with IO-Link
22
LED1
LED2
1
2
LED1
LED2
1
2
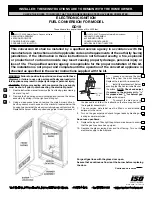
Fig. 11: Stroke time monitoring when changing end positions 1 --> 2 or when changing end positions 2 --> 1.
Parameter
Explanation
(A)
[Current actuator runtime 1 --> 2]
[Current actuator runtime 2 --> 1]
Actual time required for the change between both end positions. The
value can only be read.
(B)
[Reference actuator runtime 1 --> 2]
[Reference actuator runtime 2 --> 1]
Required time for the change between both end positions.
(C)
[Tolerance actuator runtime 1 --> 2]
[Tolerance actuator runtime 2 --> 1]
Tolerated difference between (A) and (B).
Tab. 1: Parameters for stroke time monitoring
Example:
[Reference actuator runtime 1 --> 2]: 1000 ms
[Tolerance actuator runtime 1 --> 2]: 400 ms
If the [Current actuator runtime 1 --> 2] is less than 600 ms, the event "actuator runtime not reached" will be activated.
If the [Current actuator runtime 1 --> 2] is more than 1400 ms, the event "actuator runtime exceeded" will be activated.
Setting range of the tolerance actuator runtime: 20…20 000 ms. Values outside the setting
range will be automatically corrected to the minimum or maximum value during application
teach.
Manual parameter setting
u
Parameter setting of switching signal channels SSC1.1 and SSC1.2
positions (short-stroke cylinder)
.
u
Call up [Parameters] > [Output Configuration].
u
Select [oux] and set the diagnostic function for output OUTx: [dOU / diagnostic output].
u
Select [dFUx] and set [TimeoutOn / Timeout 1 --> 2] or [TimeoutOff / Timeout 2 --> 1].
u
Select [Parameter] > [Signal].
u
Select and set the [Reference actuator runtime x --> y.]
-or-
execute command: [ Apply Reference actuator runtime x --> y] to adopt the value of the last stroke
time.
u
Select and set the [Tolerance actuator runtime x --> y].
Parameter setting via teach:
u
w
The device recognises minimum and maximum values as end positions after the piston rod has
been moved in and out three times and independently sets the switch points for SSC1.1 and
SSC1.2 with the mode [Single Point].
w
The average runtime for the piston rod moving in and out is taken as the [Reference actuator
runtime x --> y].
w
The tolerance time is set automatically:
[Tolerance actuator runtime x --> y] = 50 % of [Current actuator runtime x --> y].