















p24
p25
section 6
section 6
Situations When Recalibration is Required:
1. Compass data anomalies. Front indicator blinks fast.
2. Flight venue is far from the place where last compass calibration was conducted.
3. There are changes in quadcopter’s physical structure.
4. The quadcopter drifts a lot while flying, or cannot fly straight.
If the Q-Cop 450 is still experiencing flight instability, it is possible that the gyro needs to be calibrated as well.
If so, please follow the steps below.
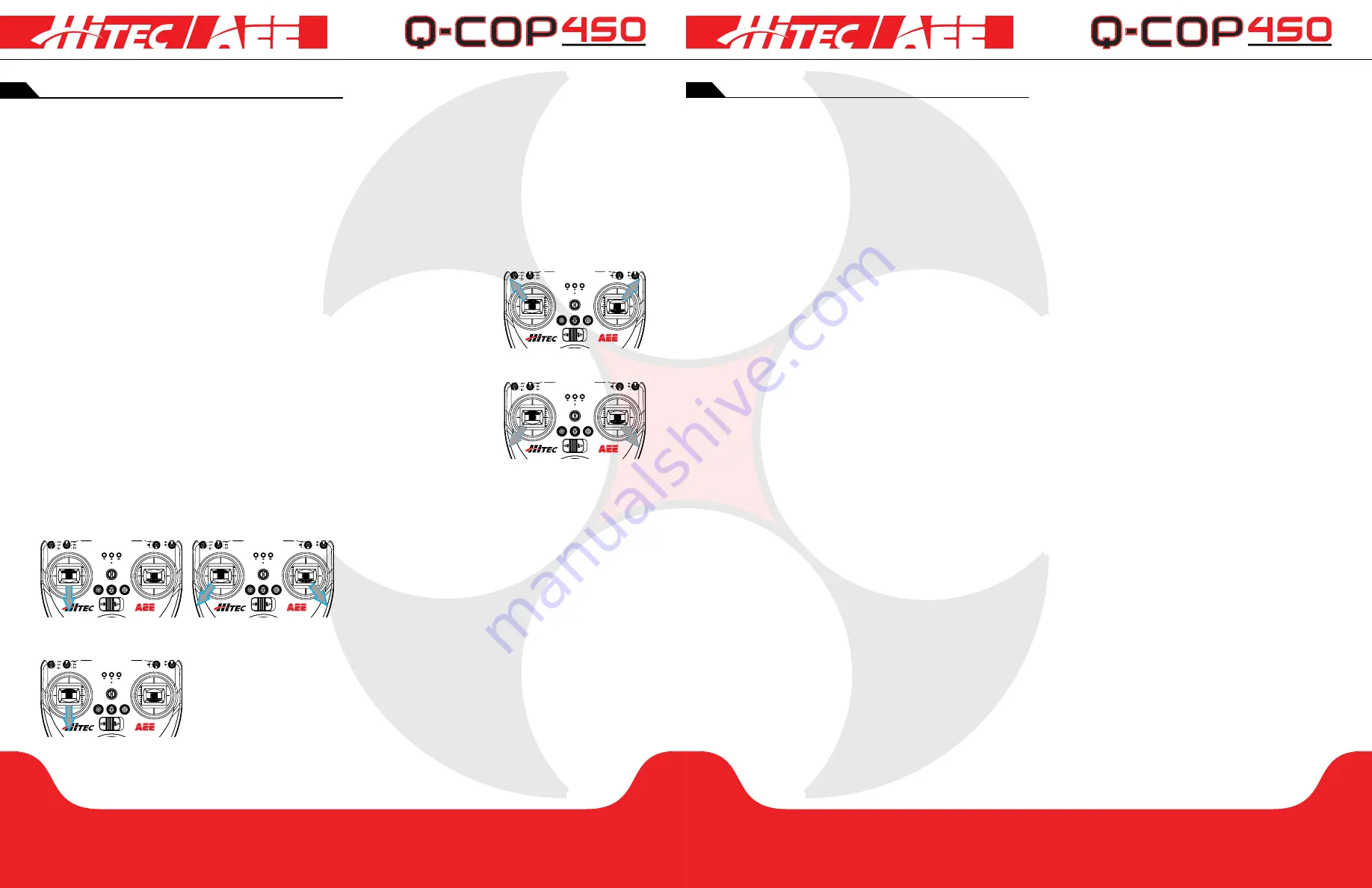
Gyro Calibration Procedure:
1. Place the Q-Cop 450 on a level flat surface.
2. Turn on Transmitter and Q-Cop 450, wait until the Q-Cop front indicators are solid.
3. Toggle the left stick to the upper left corner, and the right stick to the upper right
corner until the rear indicators begin blinking. Then, release the joysticks.
4. Wait for the rear indicators to return solid which indicates calibration success.
5. Repeat the steps for compass calibration from the previous page.
Starting/Stopping the Motors:
Starting the Motors:
Toggle the sticks as shown in the illustration, Combination Stick Command [CSC], to
start the motor. Toggle the left stick to the bottom left corner, and toggle the right
sticks to the bottom right corner. When performing CSC, toggle the sticks quickly
and accurately. After the motors start, release the sticks immediately.
Stopping the Motors:
After the motors start, there are two ways to stop it:
1. After the quadcopter lands, toggle the throttle stick to the lowest position and then perform CSC. The
motors will immediately stop. Release the sticks after the motors stop.
Flying the quadcopter
Flying the quadcopter
Basic Flight Procedures:
1. Place the Q-Cop 450 on flat and open ground, and ensure the battery indicator faces towards you.
2. Turn ON the transmitter, repeater and quadcopter.
3. Run the Hitec AEE App, connect the mobile device and Q-Cop 450, and navigate to the camera preview screen.
4. Wait until the tail indicator blinks slowly. The Q-Cop 450 enters a safe flying state. Perform CSC to start the motors.
5. Push up the throttle stick slowly for smooth take-off. Please refer to the transmitter control instructions for
detailed control procedures.
6. Use the Hitec AEE App to take photos and videos, and enjoy the flight. For details refer to “Using Hitec AEE App.”
7. When landing, slowly pull down the throttle stick to make the quadcopter descend slowly to the ground.
8. After landing, pull the throttle stick to the lowest position and hold for more than 5 seconds until the motors stop.
9. After motors stop, turn off the quadcopter, repeater, and transmitter one after the other.
During flight, if all 4 arm indicators slow blink or fast blink, it indicates the quadcopter has entered a low battery
state. Please refer to the battery warning functions for details on the next page.
Aerial Photography Tips and Tricks:
1. Perform pre-flight checks.
2. Try to capture photos and record videos during safe flight status.
3. Try to capture photos and record videos in sunny weather with little wind.
4. Set camera settings as per shooting requirements, such as video resolution, picture size, etc.
5. Carry out a trial flight before actual flight to help plan the route and frame your photos and videos.
6. During flight, push the throttle stick as slowly as possible to ensure the quadcopter flies smoothly.
Failsafe Protections:
With the Failsafe mode, if the quadcopter loses the signal from the transmitter (i.e., you lose control), the
Automatic Flight Control system will control the quadcopter, return it to the starting point and land it safely.
This reduces the chances of the quadcopter getting lost or crashing in the event of a lost signal.
Home Point:
Indicates the quadcopter’s position when the quadcopter’s GPS successfully scans and connects to the satellite.
Scenarios When Quadcopter Enters Failsafe Mode:
1. When transmitter is turned off.
2. The flight distance is beyond the effective range of the transmitter signal.
3. There are obstructions between the transmitter and the quadcopter.
4. There is interference in transmitter signal.
Failsafe and Return Procedure:
If you lose control of the quadcopter during flight, the quadcopter will automatically follow the below
operating procedures:
1. The quadcopter automatically slows down and hovers in one location.
2. If the quadcopter regains signal from the transmitter within 2 seconds, the flight control returns to Normal
Mode, and the quadcopter will not enter Failsafe Mode and will not automatically fly back to Home Point.
NULL
S1
S2
S3
S4
GPS
NRM
NULL
S1
S2
S3
S4
GPS
NRM
NULL
S1
S2
S3
S4
GPS
NRM
2. After the quadcopter lands, toggle the throttle stick to the lowest position and hold for 5 seconds to stop
the motors.
NULL
S1
S2
S3
S4
GPS
NRM
NULL
S1
S2
S3
S4
GPS
NRM
Do not turn the motors off during flight or else the quadcopter may crash.
Содержание AEE Q-COP 450
Страница 1: ......