



























Description of CANopen
7100.006424_Bus description_PSD4xx_CA_H_ENG 13
08.04.2020
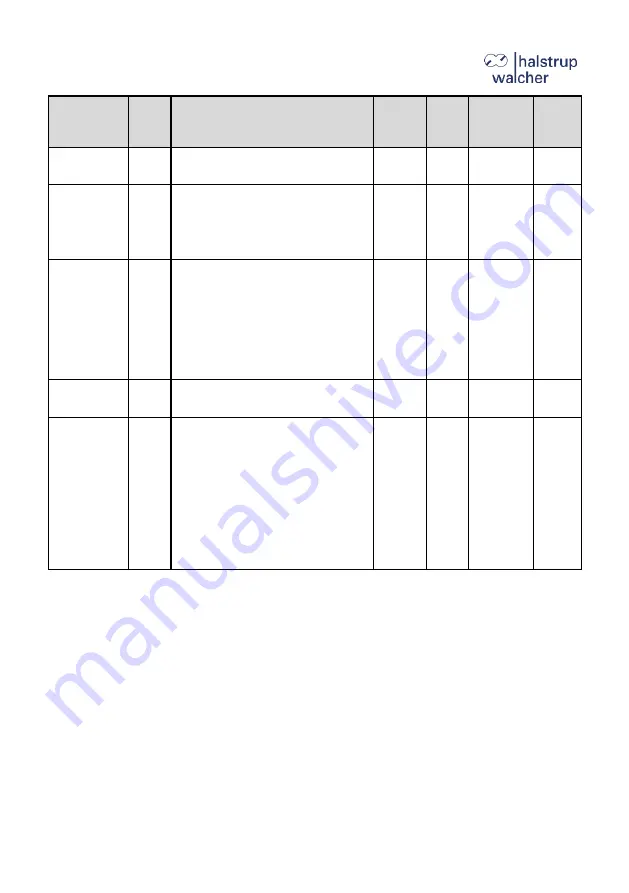
Designation
Index
no.
Function
Range
of
values
Back
up?
Delivery
state
R/W
2000:
0...9
10 open registers
32 bit
Yes
0
R/W
Target value 2001
Target position
Value in 1/100 mm (for default
values of counters, SDO #2010 and
denominator SDO #2011)
31 bit
No
0
R/W
Actual value 2003
Current actual position, value in
1/100 mm (for default values of
counters, SDO #2010 and
denominator SDO #2011)
Writing to this index number causes
the current position to be
“referenced” to the transferred
value
31 bit
No
R/W
Referencing
value
2004
Correction factor for the target,
actual and limit switch values
31 bit
Yes
0
R/W
Positioning
window
2006
Permissible difference between
target and actual values for the
“position reached” bit
The maximum setting value
changes according to the same
factor as the resolution
For default settings of numerator
#2010 and denominator #2011:
1…100 steps
0.025...
0.25
rotat-
ions
16 bit
Yes
2
R/W







































































