

























Description of CANopen
7100.006424_Bus description_PSD4xx_CA_H_ENG 11
08.04.2020
On:
Motor voltage OK
Flashing at 0.5 Hz
Motor voltage OK and drive in the delivery state (for parameter
values and axle positions)
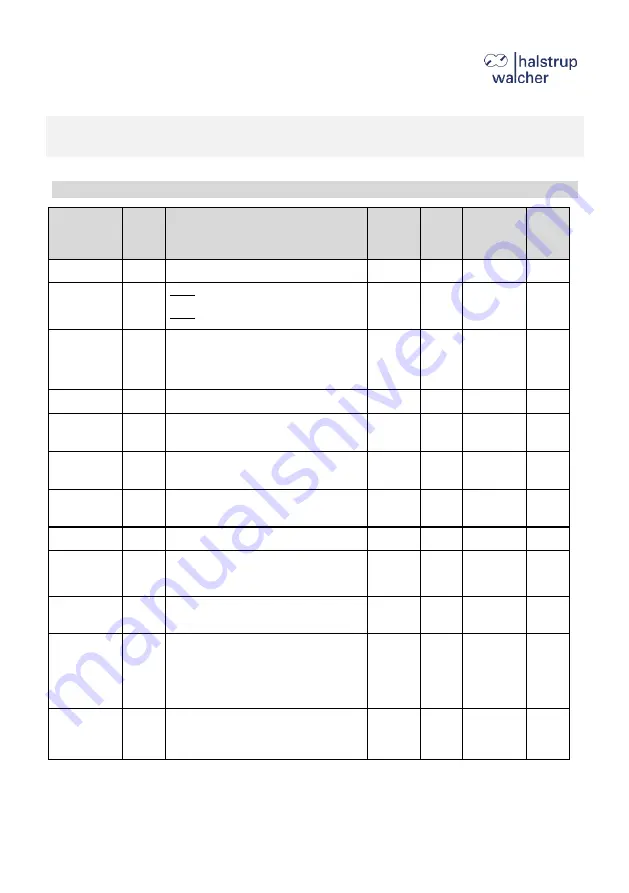
3.2
Table of entries implemented from object dictionary
Designation Index
no.
Function
Range
of
values
Back
up?
Delivery
state
R/W
Device type 1000
Returns a “0” when read
0
0
R
Error
register
1001
Bit 0: General error
Bit 4: Communication error
8 bit
0
R
Error list
1003
Sub index 0: No. of indices
Sub-index 1 and 2: last emergency
errors occurred
8 bit
32 bit
0
0
R
R
Sync ID
1005
COB ID for the sync command
32 bit
No
80h
R/W
Comm
cycle
1006
Communication cycle time
32 bit
No
0
R/W
Sync
window
1007
Synchronous window time
32 bit
No
0
R/W
Guard time 100C Guard time in ms
0 = off
16 bit
No
0
R/W
Lifetime
100D Lifetime factor
8 bit
No
0
R/W
Emcy ID
1014
COB ID for emergency message
32 bit
80h +
device
address
R
Emcy
inhibit
1015
Inhibit time for emergency message 16 bit
No
0
R/W
Consumer
heartbeat
1016
Sub index 0: No. of indices (= 2)
Sub index 1 and 2:
Bit 15-0: Heartbeat time in ms
Bit 23-16: Node ID of producer
8 bit
32 bit
No
2
0
R
R/W
Heartbeat
producer
1017
Cycle time for heartbeat via
PSD4xx
0 = off
16 bit
No
500
R/W







































































