





























Instruction Manual HIPERDRIVE with EtherCAT
23
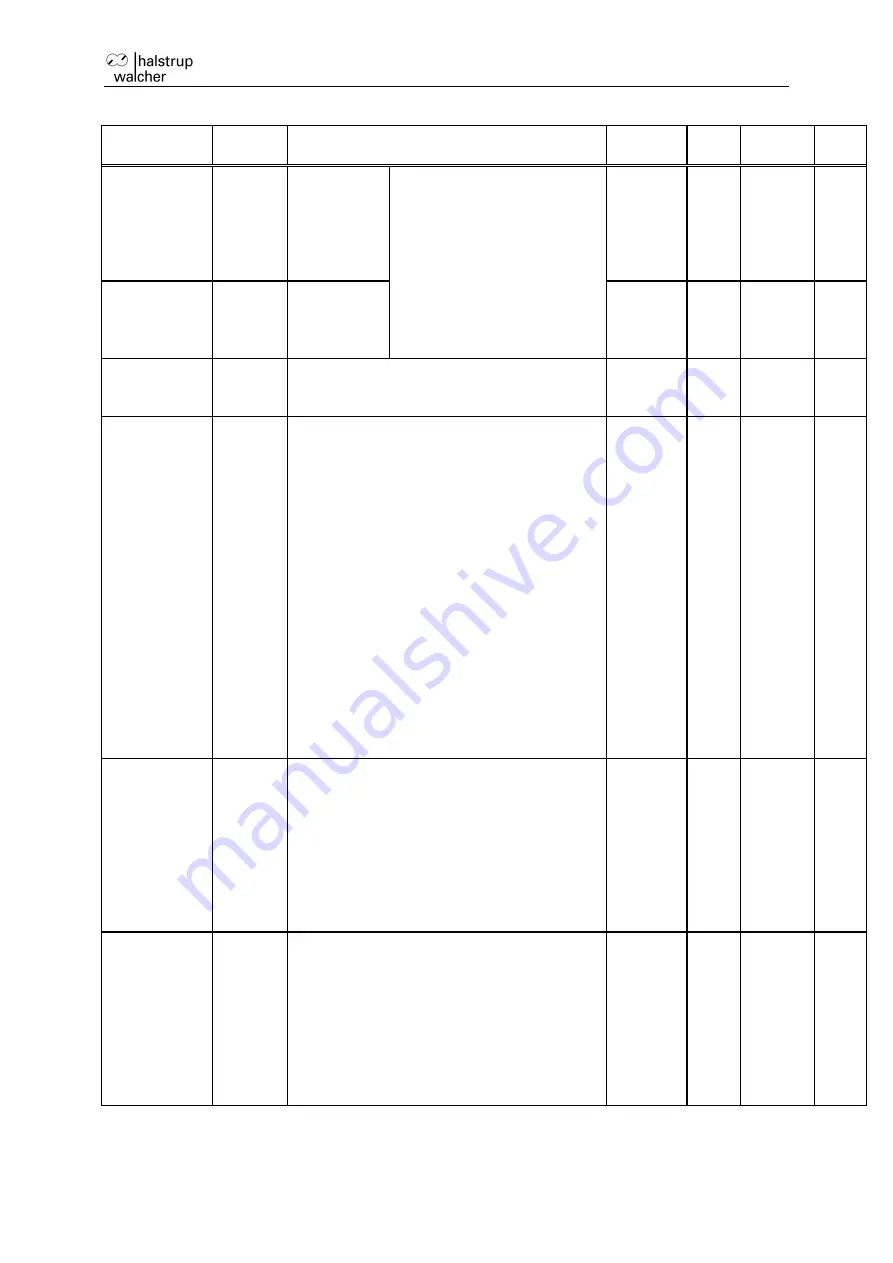
Name,
designation
Index
number
Function
Range of
values
Back
up?
Delivery
state
R/W
Position
lower limit
208A
Minimum
permitted
target
position
The upper limit must be
min. 1 higher than the lower
limit.
Values will only be
accepted if the current
actual position is within the
newly defined positioning
range.
see table
31 bit
yes
see
table
R/W
Position
upper limit
208B
Maximum
permitted
target
position
see table
31 bit
yes
see
table
R/W
Max. target
speed
(r.p.m.)
208C
100% value of the target speed [0.1
r.p.m.]
5…350
16 bit
yes
350
R/W
New target
position
208E
Actual position to be displayed at the
current position
The new actual position must be located
within the position range defined by the
limits.
The value is used for referencing the
internal measuring system to the physical
conditions. Resetting has no effect.
Setting to the delivery state sets the value
to 0, the new actual position then
corresponds to the position of the output
shaft and is located between 0 and 1
revolution.
The value entered is rounded up or down
to a multiple of 64.
31 bit
yes
0
R/W
Jog 1
208F
Inching run with
switch “S5” (“Jog +”)
Sub index 0: No. of indices (= 3)
8 bit
31 bit
1…100
8 bit
1…100
8 bit
no
no
no
3
4096
100
100
R
R/W
R/W
R/W
Sub 1:
Sub 2:
Sub 3:
step width: Number of
increments a drive is moved by
pressing the switch “S5”
Sets the speed (r.p.m.) as a %
of the max. value (SDO #208C)
Sets the torque as % of the
maximum value
Jog 2
2090
Inching run with switch “S4” (“Jog -”)
Sub index 0: No. of indices (= 3)
8 bit
31 bit
1…100
8 bit
1…100
8 bit
no
no
no
3
-4096
100
100
R
R/W
R/W
R/W
Sub 1:
Sub 2:
Sub 3:
step width: Number of
increments a drive is moved by
pressing the switch “S4”
Sets the speed (r.p.m.) as a %
of the max. value (SDO #208C)
Sets the torque as % of the
maximum value



























































