



























Instruction Manual HIPERDRIVE with EtherCAT
13
The former is generally selected if the motor power supply is run in a safety circuit
with the EMERGENCY STOP and the databus has to remain active during an
EMERGENCY STOP, or if the motor power supply does not permit correct operation
of the bus adapter due to inadequate voltage stability or high interference voltages.
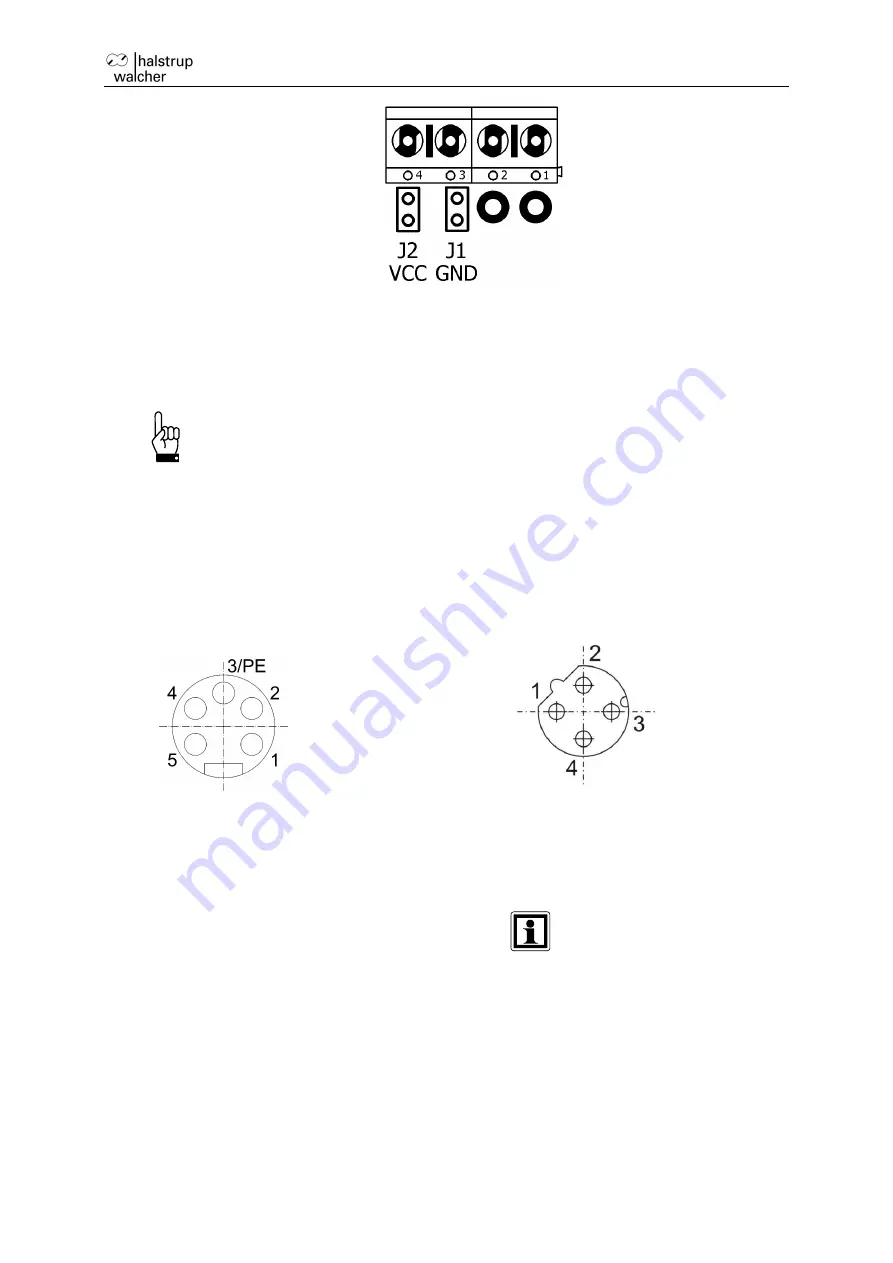
The jumper J1 for the connection between the two GND potentials
always must be closed, because otherwise the differences in the
potential between the two GND could become unacceptable high. In
addition, the two GND potentials should be connected outside the device
(e.g. directly at the power supplys which provide the two supply
voltages) so that potential compensating currents will not flow through
the device.
Round plug for power supply
(optional):
(External top view)
1
+24V Motor
2
Ground (motor)
3
Housing
4
Ground (control unit)
5
+24V control unit
Round socket for the bus:
(External top view)
1
TD+ (WH/GR, white/green)
2
RD+ (WH/OG, white/orange)
3
TD- (GR, green)
4
RD- (OR, orange)
Due to the use of 4-pin
sockets, only four-wire
cables should be used.
4.3 Setting the device address
The device address is assigned via the bus of the EtherCAT master. Alternatively, the
“configured station alias” can be defined using the two rotary switches (address
switch value > 0).






















































