





























En
gl
is
h (
G
B)
30
15.1.4 Control actions and parameters
Step-forced response is theoretically used to
characterise the various control actions. Step-forced
response refers to the response of the controlled
variable calculated by the controller if the deviation
suddenly assumes or retains a specific value.
The characteristic parameters of the various control
actions depend on the step-forced response. In the
diagrams below, the deviation occurs at the time to
and then remains constant.
The diagrams below are essential for defining how
the parameters are used in a theoretical way as they
assume that the controlled variable does not react to
all attempts to control it.
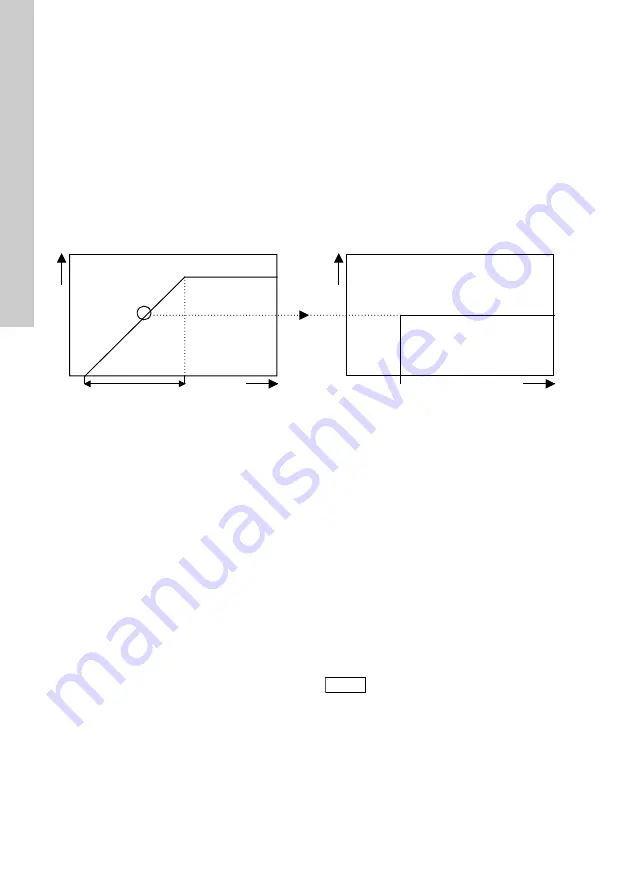
Proportional action
With a proportional action (P) controller, the
manipulated variable is proportional to the deviation.
The range within which this applies is referred to as
the proportional band X
p
. The upper limit of this band
is limited e.g. by the maximum of the final control
element, but can also be set below this. The lower
limit is defined by the smallest signal which the
controller can recognise as a deviation. The two
diagrams below show this relationship. The diagram
on the right side illustrates the step-forced response.
See fig.
Fig. 38
Proportional action
With a controller with a pure P action, a certain
steady-state deviation always remains since the
manipulated variable becomes smaller and smaller
as the actual value approaches the setpoint.
Once the setpoint has been reached, the
manipulated variable is also equal to zero.
As an example, the concentration of chlorine in the
water corresponds e.g. exactly to the setpoint, but a
small supply of chlorine is always necessary to
permanently retain the setpoint. This cannot be
achieved using the P controller since this outputs a
manipulated variable of zero in this case.
Integral action, proportional-plus-integral action
With an integral action (I) controller, the manipulated
value increases linearly with the deviation.
The magnitude of the deviation linearly influences
the positioning speed. With the P controller, the
magnitude of the deviation linearly influences the
manipulated variable.
The upper limit is only limited by the maximum of the
final control element. Thus step-forced response of
the upper limit is a straight line increasing from zero
which changes to a horizontal line at the maximum of
the final control element.
Therefore a sufficiently large manipulated variable is
still generated close to the setpoint and there is no
steady-state deviation. In the case of very high
deviations, the manipulated variable may be too
small at the beginning and thus the controller is too
slow.
For that reason a PI controller is often used in
practice. A PI controller is a combination of a P and I
controller.
When a deviation occurs, a manipulated variable
corresponding to X
p
is immediately generated which
increases with time. The reset time Tn can be
obtained from the corresponding diagram. The reset
time defines the slope of the straight line and thus
the speed with which the control signal increases.
The longer the reset time, the slower the control
signal increases with time.
If T
n
=
∞
, a pure P action is present.
TM
03
70
94
16
13
P
X
p
P
t
0
Manipulated variable
Manipulated variable
Deviation
Time
Note
In the setting of Conex DIS-2Q, T
n
=
∞
is often printed as T
n
= 0 for technical
reasons.





















































