
























We recommend using LiDAR360, a comprehensive point cloud post-processing suite developed by GreenValley International. LiDAR360
provides comprehensive toolsets for point cloud visualization, processing, analysis, and other tasks.
Is the output point cloud calibrated to be vertical to the ground?
Yes, LiBackpack point cloud processing will adjust the tilt angle of the scanner based on analysis of the IMU data. The tilt angle accuracy is in
a 1–3° range.
Why are there large amounts of high-level noise points observed in the point cloud?
These noise points are highly likely to be caused by direct sunshine. You can consider performing the scanning when there is no direct
sunshine, or you can use the “Remove Outliers” tool in LiDAR360 to remove these noise points.
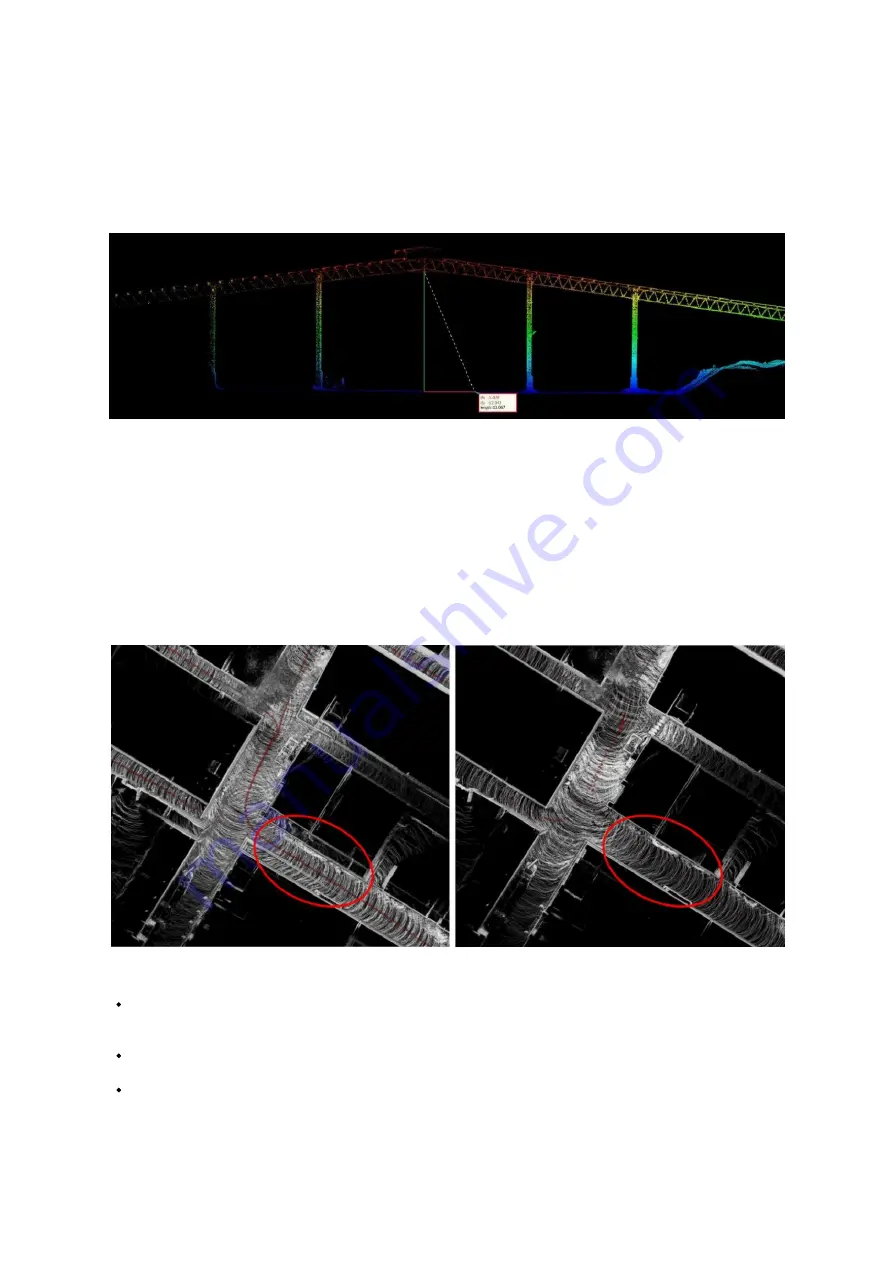
Why can repeated scanning of the same area or closed-loop scanning cause mismatch of
the point cloud?
Closed-loop scanning refers to walk through the route with closed loops while collecting data with LiBackpack C50. Currently, LiBackpack
C50 performs real-time processing and closed-loop optimization. However, because of environmental factors, the closed loops may not be
detected automatically in certain scenarios. Optionally, please send raw data file along with a data introduction to GVI for further analysis and
processing.
In what situations will the accuracy of the output point cloud be reduced?
In cylindrical/spherical tunnels or buildings without rich 3D structures. When using the device in cylindrical tunnels or buildings, it is hard
for the device to find enough 3D features, which might affect the key points matching process, and therefore influence the accuracy of the
mapping accuracy.
In areas with reflective surfaces, such as glass. Highly-reflective surfaces may result in matching errors and more noise points in the
collected data.
In narrow scanning environments such as small rooms, narrow hallways, and stairways, which may also cause matching errors. The
limited vertical field-of-view (FOV) of single VLP-16 results in a lack of data for the top and bottom of the scanned environment, which
thus affects matching accuracy.
Содержание LiBackpack C50
Страница 1: ......
Страница 12: ...EMO push pull connector STEP 8 Fully Set Up for Backpack Scanning Mode Fully Set Up...
Страница 27: ...connection Finished see full device below...
Страница 30: ...Point cloud registration...
Страница 34: ...Office Building Underground Garage...
Страница 35: ...Forest Land...
Страница 36: ...Sand Barge Construction Site...
Страница 37: ...Building Foundation Pipelines...
Страница 46: ...Conference Room Office...
Страница 47: ...Auditorium Parking Lot and Underground Parking Garage...
Страница 48: ...Parking Lot and Underground Parking Garage Office Buildings...
Страница 49: ...Forestland...
Страница 50: ...Sand barge Construction site...
Страница 51: ...Building Foundation Pipelines...
Страница 52: ...Powerlines...







































































