





























Device Description HG G-84300ZD | English, Revision 10 | Date: 01.06.2022
15
Configuration via USB – Chapter 5
5.2 Terminal Program
Every compatible terminal program
that supports the ANSI emulation
can be
used. Examples are HyperTerminal® and Tara Term®. HyperTerminal used to be part
of the scope of supply of earlier versions of Microsoft® Windows®. Additionally it
can be downloaded from the following address:
Start the terminal program on the PC and connect the Gyro with the PC (see above).
As soon as the connection is established successfully the Gyro‘s main menu accord
-
ing to section 5.3 on page 15 appears in the terminal program.
Usually the port COM1 is used for the connection. This depends on the configuration
of the PC‘s interfaces. If another port is to be used then adjust it as follows (Hyper
-
Terminal®):
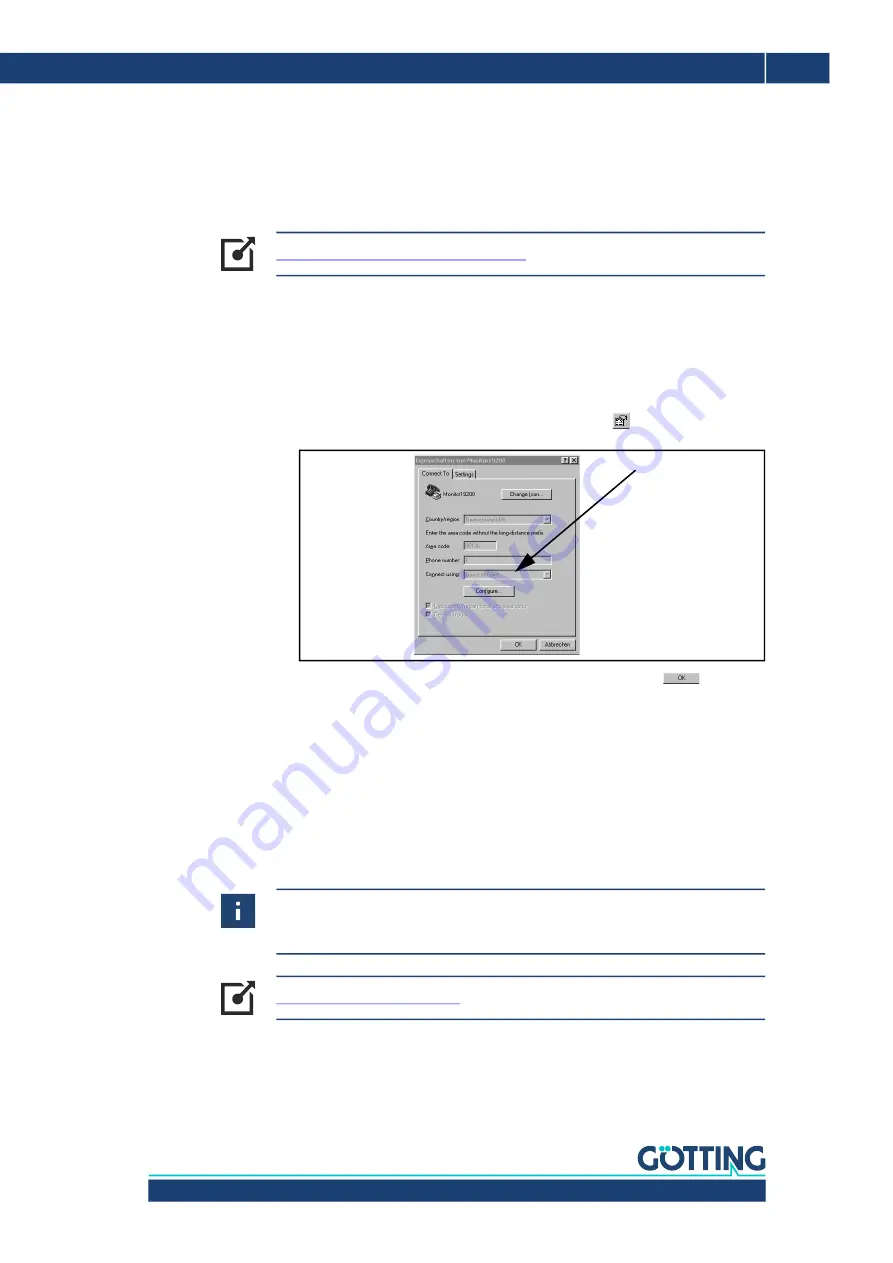
1.
Select
Properties
from the menu
File
(or lick the icon
). The following dialog
appears:
2.
Use
Connect using
to select the respective port. Confirm with
. Save the
altered values if you are asked for it while exiting HyperTerminal.
5.3 Terminal Output In Monitor Mode
The terminal output is different depending on whether the CAN interface is set to
CAN Standard or CANopen®. This can be changed via the monitor program.
In both CAN operating modes, a
Status
is output (see Figure 7 on page 16). The
status normally shows
0000 OK (0)
. A status
0 means an error in the MEMS
sensor.
https://www.hilgraeve.com/hyperterminal/
If the status outputs an error code, please make a note of the error code and con
-
tact the Götting KG service department. To do this, use the contact data given on
the back of this device description or visit the following website.