





























Step 7. Disengage the slave motion
To disengage the cam, use the command
EQ x,y,z,w
where x,y,z,w are the master positions at which the corresponding slave axes are disengaged.
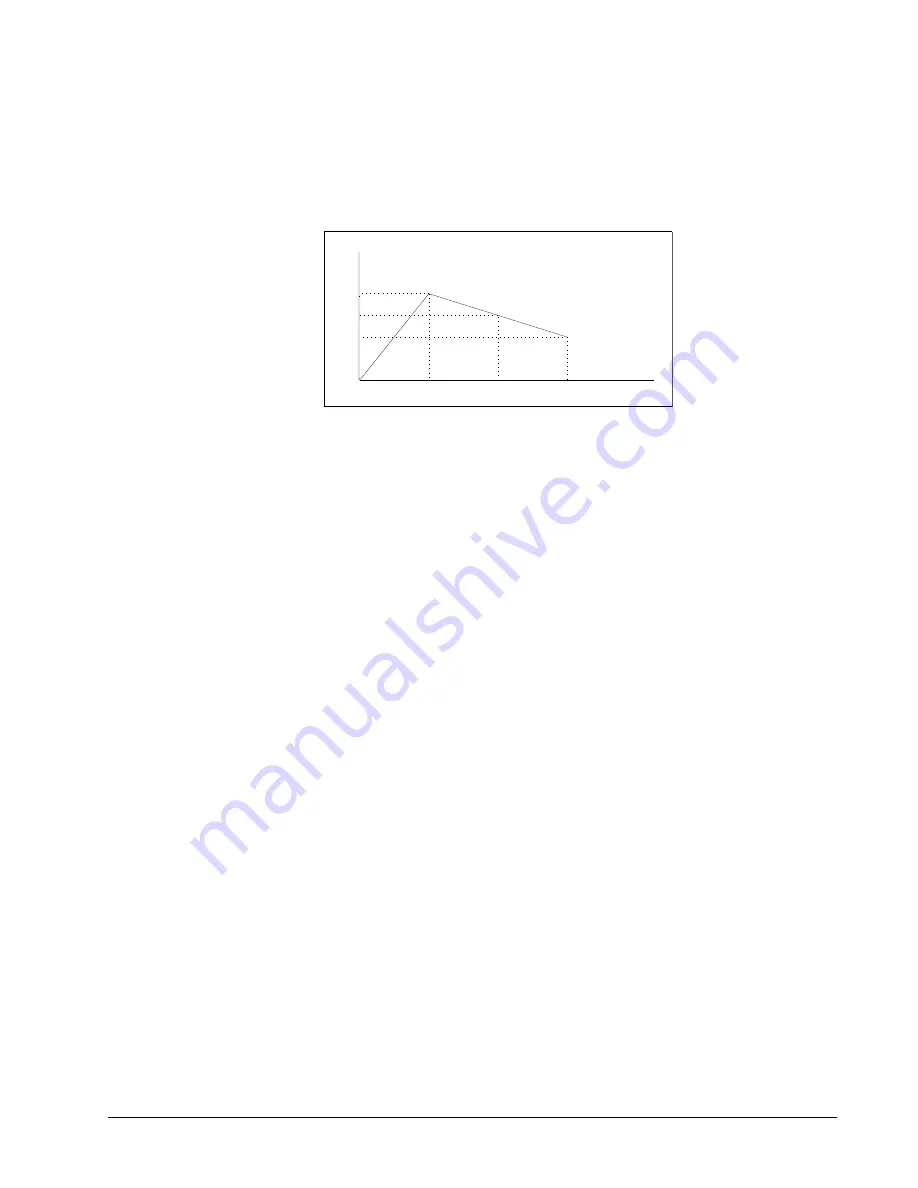
Figure 6.13: Electronic Cam Example
This disengages the slave axis at a specified master position. If the parameter is outside the master cycle, the
stopping is instantaneous.
To illustrate the complete process, consider the cam relationship described by
the equation:
Y = 0.5 * X + 100 sin (0.18*X)
where X is the master, with a cycle of 2000 counts.
The cam table can be constructed manually, point by point, or automatically by a program. The following program
includes the set-up.
The instruction EAX defines X as the master axis. The cycle of the master is
2000. Over that cycle, Y varies by 1000. This leads to the instruction EM 2000,1000.
Suppose we want to define a table with 100 segments. This implies increments of 20 counts each. If the master
points are to start at zero, the required instruction is EP 20,0.
The following routine computes the table points. As the phase equals 0.18X and X varies in increments of 20, the
phase varies by increments of 3.6 . The program then computes the values of Y according to the equation and
assigns the values to the table with the instruction ET[N] = ,Y.
INSTRUCTION
INTERPRETATION
#SETUP
Label
EAX
Select X as master
EM 2000,1000
Cam cycles
EP 20,0
Master position increments
N = 0
Index
#LOOP
Loop to construct table from equation
P = N
3.6
Note 3.6 = 0.18 * 20
S = @SIN [P]*100
Define sine position
Y = N*10+S
Define slave position
ET [N] =, Y
Define table
N = N+1
JP #LOOP, N<=100
Repeat the process
EN
Now suppose that the slave axis is engaged with a start signal, input 1, but that both the engagement and
disengagement points must be done at the center of the cycle: X = 1000 and Y = 500. This implies that Y must be
driven to that point to avoid a jump.
Chapter 6 Programming Motion ▫ 94
DMC-40x0 User Manual
Master X
4000
2250
2000
6000
3000
1500
0