





























the bandwidth for the X axis, issue AWX=v,l,n where v represents the DC voltage input to the card, l represents the
inductance of the motor in millihenries, and n represents 0 or 1 for the AU setting.
NOTE
:For most applications, unless the motor has more than 5 mH of inductance with a 24V supply, or 10 mH of
inductance with a 48 volts supply, the normal current loop bandwidth option should be chosen. AW will return the
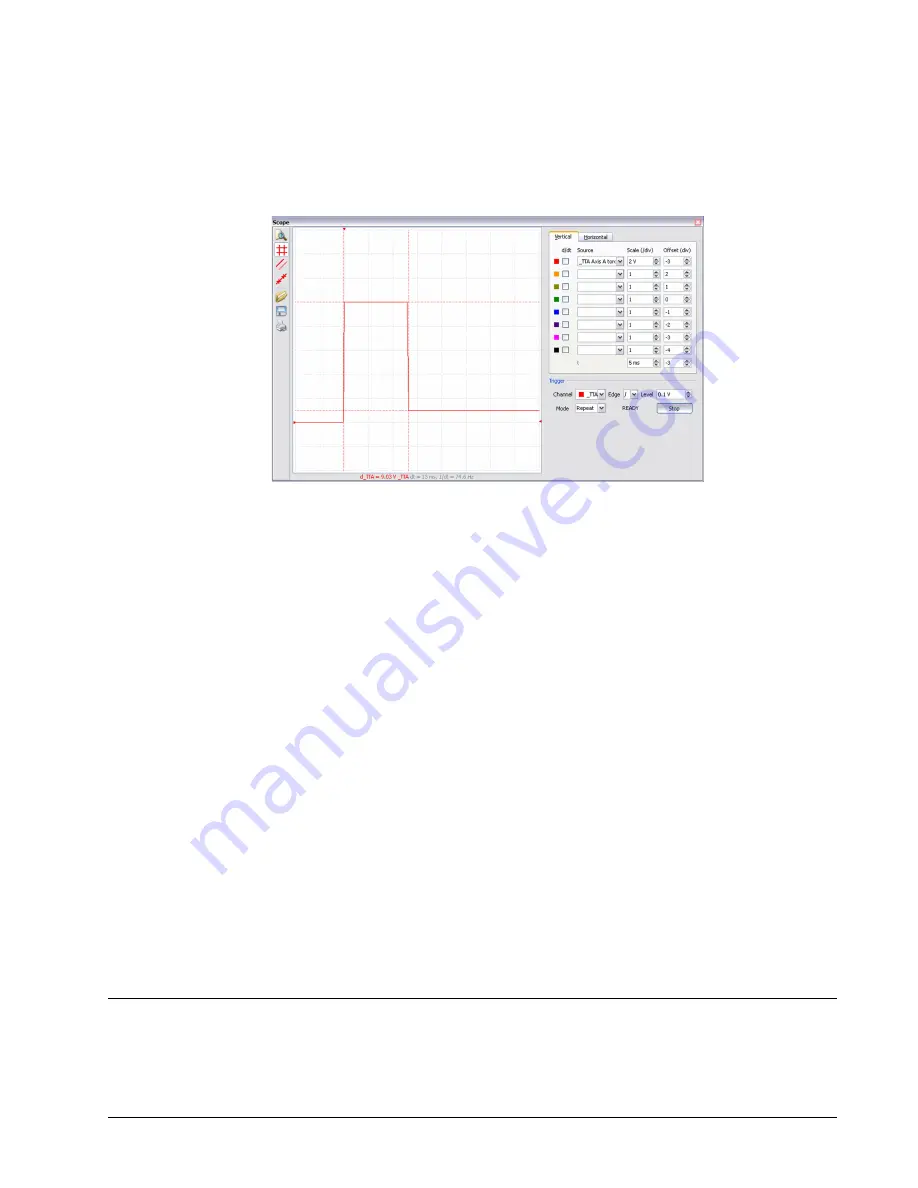
current loop bandwidth in Hertz.
Figure A3.2: Peak Current Operation
Chopper Mode
The AMP-43240 runs in what is called a “Chopper” mode. The chopper mode is in contrast to the normal inverter
mode (AMP-43040) in which the amplifier sends PWM power to the motor of ±VS. In chopper mode, the amplifier
sends a 0 to +VS PWM to the motor when moving in the forward direction, and a 0 to –VS PWM to the motor when
moving in the negative direction.
Using External Amplifiers
Use connectors on top of controller to access necessary signals to run external amplifiers. In order to use the full
torque limit, make sure the AG setting for the axes using external amplifiers are set to 0 or 1. Set the BR command
to 1 for any axis that will be setup to run external amplifiers (this will disable the hall error protection). For more
information on connecting external amplifiers, see Step A in Chapter 2.
ELO Input
If the ELO input on the controller is triggered, the amplifier will be shut down at a hardware level, the motors will
be essentially in a Motor Off (MO) state. TA3 will change state and the #AMPERR routine will run when the ELO
input is triggered. To recover from an ELO, an MO followed by a WT 2, and an SH must be issued, or the controller
must be reset.
It is recommended that OE1 be used for all axes when the ELO is used in an application.
See the Optoisolated Input Electrical Information section in Chapter 3 Connecting Hardware for information on
connecting the ELO input.
Error Monitoring and Protection
The amplifier is protected against over-voltage, under-voltage, over-temperature, and over-current for brush and
brushless operation. The controller will also monitor for illegal Hall states (000 or 111 with 120° phasing). The
A3 – AMP-43240 (-D3240) ▫ 225
DMC-40x0 User Manual