










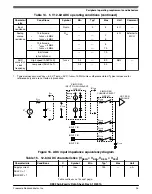












communicating with slower peripheral devices. All timing is shown with respect to 20%
V
DD
and 80% V
DD
, unless noted, and 25 pF load on all SPI pins. All timing assumes
high-drive strength is enabled for SPI output pins.
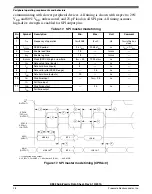
Table 17. SPI master mode timing
Nu
m.
Symbol
Description
Min.
Max.
Unit
Comment
1
f
op
Frequency of operation
f
Bus
/2048
f
Bus
/2
Hz
f
Bus
is the bus
clock
2
t
SPSCK
SPSCK period
2 x t
Bus
2048 x t
Bus
ns
t
Bus
= 1/f
Bus
3
t
Lead
Enable lead time
1/2
—
t
SPSCK
—
4
t
Lag
Enable lag time
1/2
—
t
SPSCK
—
5
t
WSPSCK
Clock (SPSCK) high or low time
t
Bus
– 30
1024 x t
Bus
ns
—
6
t
SU
Data setup time (inputs)
8
—
ns
—
7
t
HI
Data hold time (inputs)
8
—
ns
—
8
t
v
Data valid (after SPSCK edge)
—
25
ns
—
9
t
HO
Data hold time (outputs)
20
—
ns
—
10
t
RI
Rise time input
—
t
Bus
– 25
ns
—
t
FI
Fall time input
11
t
RO
Rise time output
—
25
ns
—
t
FO
Fall time output
(OUTPUT)
2
8
6
7
MSB IN2
LSB IN
MSB OUT2
LSB OUT
9
5
5
3
(CPOL=0)
4
11
11
10
10
SPSCK
SPSCK
(CPOL=1)
2. LSBF = 0. For LSBF = 1, bit order is LSB, bit 1, ..., bit 6, MSB.
1. If configured as an output.
SS1
(OUTPUT)
(OUTPUT)
MOSI
(OUTPUT)
MISO
(INPUT)
BIT 6 . . . 1
BIT 6 . . . 1
Figure 17. SPI master mode timing (CPHA=0)
Peripheral operating requirements and behaviors
KE02 Sub-Family Data Sheet, Rev4, 10/2014.
28
Freescale Semiconductor, Inc.







































































