VEHICLE SAFETY CONTROLLER
© 2021, FORT Robotics. Company Confidential. Do not distribute.
935-0003 Rev C
9 of 33
4.8.2.
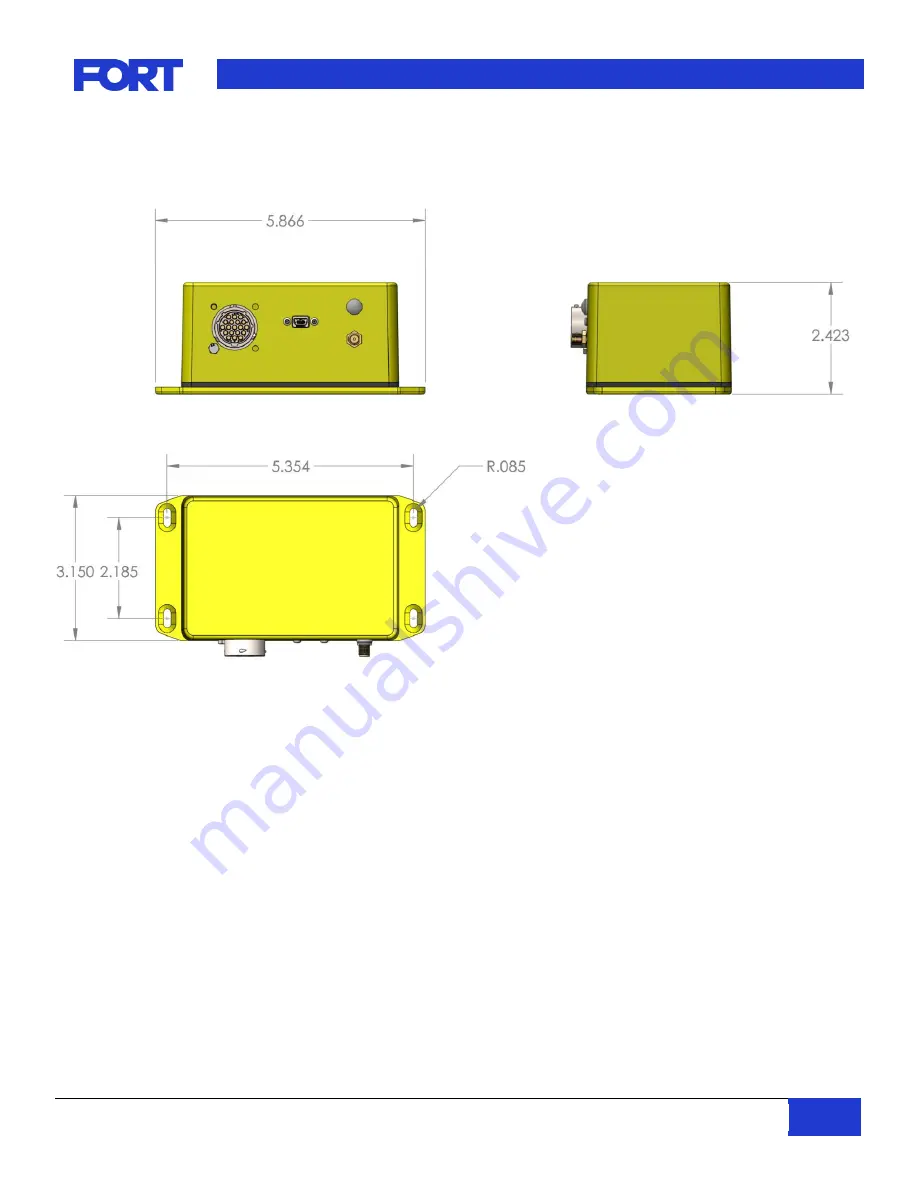
VSC-006
–
Ecomate RM
Figure 5
VSC-006 Mechanical Drawing (all dimensions in inches)
Страница 1: ...mmunications o Frequency bands include 900 MHz 2 km LOS 2 4 GHz 200 m LOS other bands available USB RS 232 serial and CAN bus support for flexible system integration options Second generation SafetySense architecture for high reliability no single point of failure safety implementation Dual wired emergency stop loop with active diagnostics o Designed to meet ISO 13849 Category 3 Performance Level ...
Страница 2: ...ble programmable controllers run frequent diagnostics on themselves as well as their partner to ensure any internal or external faults are detected before a demand on the safety system occurs Figure 1 Safety Architecture The figure above illustrates the internal structure of the VSC It is designed from the ground up to ensure that no single point of failure hardware or software exists that could c...
Страница 3: ...ional operation of the device at these or any other conditions beyond those indicated under Recommended Operating Conditions is not implied Exposure to absolute maximum rated conditions for extended periods may affect device reliability Table 1 Absolute Maximum Ratings 4 2 Recommended Operating Conditions Parameter Minimum Typical Maximum Unit PVin High Operating Voltage 9 12 36 V PVin Input Power...
Страница 4: ... Zealand ISM Radio Radio Code 903 Parameter Minimum Typical Maximum Unit Transmit Power 140 10001 mW Receive Sensitivity 108 dBm Frequency 915 928 MHz Channel Size 250 kHz Number of Channels 52 Error Detection 32 bit CRC Spread Spectrum FHSS 1 Maximum depends on local regulations Inquire for details Table 4 915 928MHz Australia New Zealand Radio Specifications 4 3 3 2 4GHz ISM Radio Radio Code 240...
Страница 5: ...ver 40 mA CAN H L high level output current receiver 8 mA CAN H L low level output current driver 48 mA CAN H L low level output current receiver 8 mA CAN H L positive going input threshold 750 900 mV CAN H L negative going input threshold 500 650 mV CAN H L input resistance 25 35 50 kΩ Table 6 CAN Interface Specifications Note CANbus installations require proper termination on the data lines CAN_...
Страница 6: ...ge RS 232 transmit data interface K K RS 232_RX I White Yellow RS 232 receive data interface L L Estop_Out_0 O White Brown Estop 0 loop output Connect to Estop In 0 through one or more normally closed emergency stop switches M M Estop_Out_1 O White Violet Estop 1 loop output Connect to Estop In 1 through one or more normally closed emergency stop switches N N MasterEnable1_NO O White Normally open...
Страница 7: ...eserved Do Not Connect 4 USB D I O USB data negative differential signal 5 USB D I O USB data positive differential signal 6 GND Vss USB ground Table 9 VSC USB VIC 004 connector pinout and signal descriptions 4 6 2 VSC 006 USB Mini AB The standard USB Mini AB connector is used primarily for configuration and firmware upgrades or system communication if the USB CDC interface is utilized 4 7 Mechani...
Страница 8: ...al Maximum Unit Ingress Protection IP661 Weight 1 0 lbs Antenna Connector RP SMA Female Data Connector USB Mini AB I O Connector Amphenol Ecomate RM Amphenol part RTO01619PNH 1 When data connector is connected Table 11 VSC 006 Mechanical Specifications 4 8 Mechanical Drawing 4 8 1 VSC 009 38999 Figure 4 VSC 009 Mechanical Drawing All Dimensions in Inches ...
Страница 9: ...VEHICLE SAFETY CONTROLLER 2021 FORT Robotics Company Confidential Do not distribute 935 0003 Rev C 9 of 33 4 8 2 VSC 006 Ecomate RM Figure 5 VSC 006 Mechanical Drawing all dimensions in inches ...
Страница 10: ... bypassed externally as shown below It is critical that the Estop_In_0 and Estop_In_1 signals are treated properly If one or both signals are treated improperly or left unconnected the VSC will treat this as a fault condition and de assert the Master Enable signals Figure 6 Emergency Stop Input Wiring Access to the internal safety relays are given through the MasterEnable_NO and MasterEnable_COM s...
Страница 11: ...are asserted immediately by VSC hardware The Safe Remote Control System has five modes while operating Local Remote Operational Menu and Pause The basic features of these modes are summarized in Table 12 The SRC features 6 axis control 8 buttons and an emergency stop but the joystick and button data are only available when the system is in operational mode as described below If a Wireless Emergenc...
Страница 12: ...e VSC will continue to output the heartbeat message with an indication that the Emergency Stop is active because of the unsafe condition The VSC will also continue to output the joystick message with all values set to 0 to guarantee no motion will occur The Master Enable outputs from the VSC will also be asserted and can be used to prevent motion 6 2 Remote Mode Remote mode occurs when the SRC and...
Страница 13: ... to output the joystick message with all values set to 0 to guarantee no motion will occur 6 4 Menu Mode Menu Mode is used to modify system parameters on the SRC When in Menu Mode the SRC and the VSC have established a communication link however no motion is intended The SRC LCD display will show it is in Menu Mode If the VSC is in Menu Mode the VSC will continue to output the heartbeat message wi...
Страница 14: ...ick movement and button presses on the SRC will be output from the VSC The VSC s Master Enable relay is energized providing a closed circuit condition indicating a safe state For configurations without an SRC the joystick messages will be available but will always be zeroed If the VSC is in Operational Mode the VSC will output the heartbeat message with an indication that the system is operational...
Страница 15: ...urn to local mode or searching mode as specified The VSC will also continue to output the joystick message with all values set to 0 to guarantee no motion will occur The Master Enable outputs from the VSC will also be de asserted and should be used to prevent motion The Master Enable outputs will only be asserted once the unsafe condition has been acknowledged and corrected The system will always ...
Страница 16: ...Size uint8 0x01 int8 0x01 uint16 0x02 int16 0x02 uint32 0x04 int32 0x04 Table 15 Packet Protocol Data Types 7 2 Packet Structure Byte Offset Type Size Description 0 uint16 2 Header 2 uint8 1 Message Type 3 uint8 1 Message Length Size of variable data 4 Variable N Data Packet N 4 uint16 2 16 Bit Checksum Table 16 Packet Protocol Structure 7 3 Message Types The FORT packet protocol contains all of t...
Страница 17: ...See Checksum Reference Table 18 Packet Protocol Joystick Message 7 3 2 Heartbeat Message From VSC The heartbeat message from the VSC contains the Emergency Stop indication as well as the current system state Byte Offset Type Size Description Value 0 uint16 2 Header 0x1001 2 uint8 1 Message Type 0x20 3 uint8 1 Message Length 0x06 4 uint8 1 VSC Mode See state definitions 5 uint8 1 Autonomy Mode 0 Us...
Страница 18: ...eserved for future use 9 uint8 1 Reserved Reserved for future use 10 uint16 2 16 Bit Checksum See Checksum Reference Table 20 Packet Protocol Heartbeat Message From VSC 7 3 4 Heartbeat Message To VSC The heartbeat message to the VSC contains the Emergency Stop indication from the user If the User E STOP Timeout Key is set the VSC will use this message as a watchdog for the user computer as well It...
Страница 19: ... though this message uses a 32 bit into to transmit data the SRC can only display 6 characters of information it is capable of displaying all values in the range of a 16 bit integer Anything out of range will result in a XXXXXX to be displayed Byte Offset Type Size Description Value 0 uint16 2 Header 0x1001 2 uint8 1 Message Type 0x30 3 uint8 1 Message Length 0x05 4 uint8 1 User Feedback Key 0 99 ...
Страница 20: ... heartbeat messages to the VSC it will indicate an E STOP condition This item is persistent and only needs to be sent once 0 Disabled default 1 Enabled 99 Display Mode 0 Default Display Mode 1 User Text Display Mode 4 Lines 2 User Key Value Text Display Mode 4 Values w Text 3 User Key Display Mode 8 Values Table 24 User Feedback Keys 7 3 7 User Feedback Get Message To VSC The User Feedback Get mes...
Страница 21: ...ring system initialization Byte Offset Type Size Description Value 0 uint16 2 Header 0x1001 2 uint8 1 Message Type 0x31 3 uint8 1 Message Length 0x15 4 uint8 1 User Feedback Key 0 99 5 uint8 20 User Key String Up to 20 characters to be displayed 7 uint16 2 16 Bit Checksum See Checksum Reference Table 28 Packet Protocol User Feedback Message The following keys are currently defined by the system fo...
Страница 22: ...SRC Joystick Axis Reference Byte Bits Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 0 Axis Magnitude LSB s Positive Status Negative Status Neutral Status 1 Axis Magnitude MSB s Table 30 Packet Protocol Joystick Reference Status Definition 0x00 Not Set 0x01 Set 0x10 Error 0x11 Unavailable Table 31 Packet Protocol Joystick Status Reference 7 5 Button Reference The Buttons on the SRC are confi...
Страница 23: ... used is a variation of the Fletcher 16 checksum for computing a position dependent checksum devised by John G Fletcher at Lawrence Livermore Labs in the late 1970s The objective of the Fletcher checksum was to provide error detection properties approaching those of a cyclic redundancy check but with the lower computational effort associated with summation techniques The algorithm to calculate the...
Страница 24: ...ed Joystick Message 1 From VSC 16 Hz 0x0CFD D834 Right Joystick J1939 Basic Joystick Message 2 From VSC 16 Hz 0x0CFD D934 Right Joystick J1939 Extended Joystick Message 2 From VSC 16 Hz 0x0CFD E801 Heartbeat J1939 Custom Message From VSC 10 Hz 0x0CFD E861 Remote Status J1939 Custom Message From VSC 1 Hz 0x0CFD E900 User Feedback Value J1939 Custom Message To VSC Aperiodic Max rate 10 Hz 0x0CFD EA0...
Страница 25: ...ystick J1939 Extended Joystick Message 2 8 2 5 Remote Status Message From VSC The Remote Status message from the VSC contains key information pertaining to the connected remote and the status of the link between the VSC and the remote NOTE These values are not cleared when a connection is lost to the remote device Make sure to use the state in the heartbeat message to indicate whether or not a rem...
Страница 26: ...e 41 Packet Protocol User Feedback Message The following keys are currently defined by the system Key Name Description 1 9 User Values These 9 keys are allocated to custom user values that can be displayed on the LCD screen These values should be limited to 16 bit values 10 Left Vibratory Motor Control Setting this value to 1 will drive the vibratory motor on the left side of the SRC for a small p...
Страница 27: ...e third segment is sent Byte Offset Size Description Value 0 1 User Feedback Key 0 99 1 1 Segment 0 2 2 6 User Feedback String 6 ASCII Characters Table 43 Packet Protocol User Feedback Message The following keys are currently defined by the system for user strings Key Name Description 1 9 User Values These 9 keys are allocated to custom user values that can be displayed on the LCD screen Each valu...
Страница 28: ...Status Negative Status Neutral Status 1 Axis Magnitude MSB s Table 45 Packet Protocol Joystick Reference Status Definition 0x00 Not Set 0x01 Set 0x10 Error 0x11 Unavailable Table 46 Packet Protocol Joystick Status Reference 8 4 Button Reference The Buttons on the SRC are configured in a diamond The buttons are referenced as those shown below on the left hand side of the controller Up Down Left Rig...
Страница 29: ...35 0003 Rev C 29 of 33 Byte Bits Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 0 Left Status Up Status Right Status Down Status Table 47 SRC Joystick Button Reference Status Definition 0x00 Not Set 0x01 Set 0x10 Error 0x11 Unavailable Table 48 SRC Joystick Button Status Reference ...
Страница 30: ...the SRC includes the 6 primary axes Left X Left Y Left Z Right X Right Y Right Z 4 button Directional Pad the 4 numbered buttons the state of the SRC and the status of the E STOP HID class devices are encouraged where possible to use a right handed coordinate system If a user is facing a device report values should increase as controls are moved from left to right X from far to near Y and from hig...
Страница 31: ...ce must accept any interference including interference that many cause undesired operation of the device Ce dispositif est conforme aux norms permis exemptes du Canada RSS d industrie L opération est sujette aux deux conditions suivates 1 ce dispositive peut ne pas l interférence et 2 ce dispositif doit accepter n importe quelle interference y compris l interférence qui peut causer le fonctionneme...
Страница 32: ...fidential Do not distribute 935 0003 Rev C 32 of 33 12 Warranty Information The End User Agreement can be viewed here at https fortrobotics com end user agreement The OEM Supply and License Agreement can be viewed here at https fortrobotics com oem agreement ...
Страница 33: ...ute 935 0003 Rev C 33 of 33 13 Revision History Version Date Changes A 3 1 2021 Initial Release B 4 20 2021 Remove FMEDA Section C 8 19 2021 Added Remote Status Message to CAN interface FORT Robotics 1608 Walnut Street Floor 12 Philadelphia PA 19103 1 267 515 5880 fortrobotics com ...