




















Co-Pilot II reference manual
6
FMA Direct
Mounting on a helicopter
The Vertical Sensor Module is typically mounted on the boom,
close to the body. Use an installation procedure similar to boom
mounting for the Main Sensor Module. Alternatively, the Verti-
cal Sensor Module can be attached to the helicopter frame or
cockpit using the included double-sided adhesive strips.
Vertical Sensor Module mounted on helicopter boom
Mounting the IRNet Router
The IRNet Router can be mounted anywhere on the aircraft, as
long as it does not obstruct the Sensors and it has unobstructed,
line-of-sight communication with the IRNet Programmer during
setup and preflight checks.
If necessary, standard servo extensions can be used to connect the
IRNet Router to the Computer.
Tip:
The IRNet Router is only required during system setup and
preflight checks. If mounting or weight is a problem, it can be dis
-
connected and left on the ground during flights. You will need to
reconnect it to change settings or perform preflight checks.
Mounting the Co-Pilot™ II Computer
Mount the Computer in a manner similar to your receiver.
Full helicopter installation
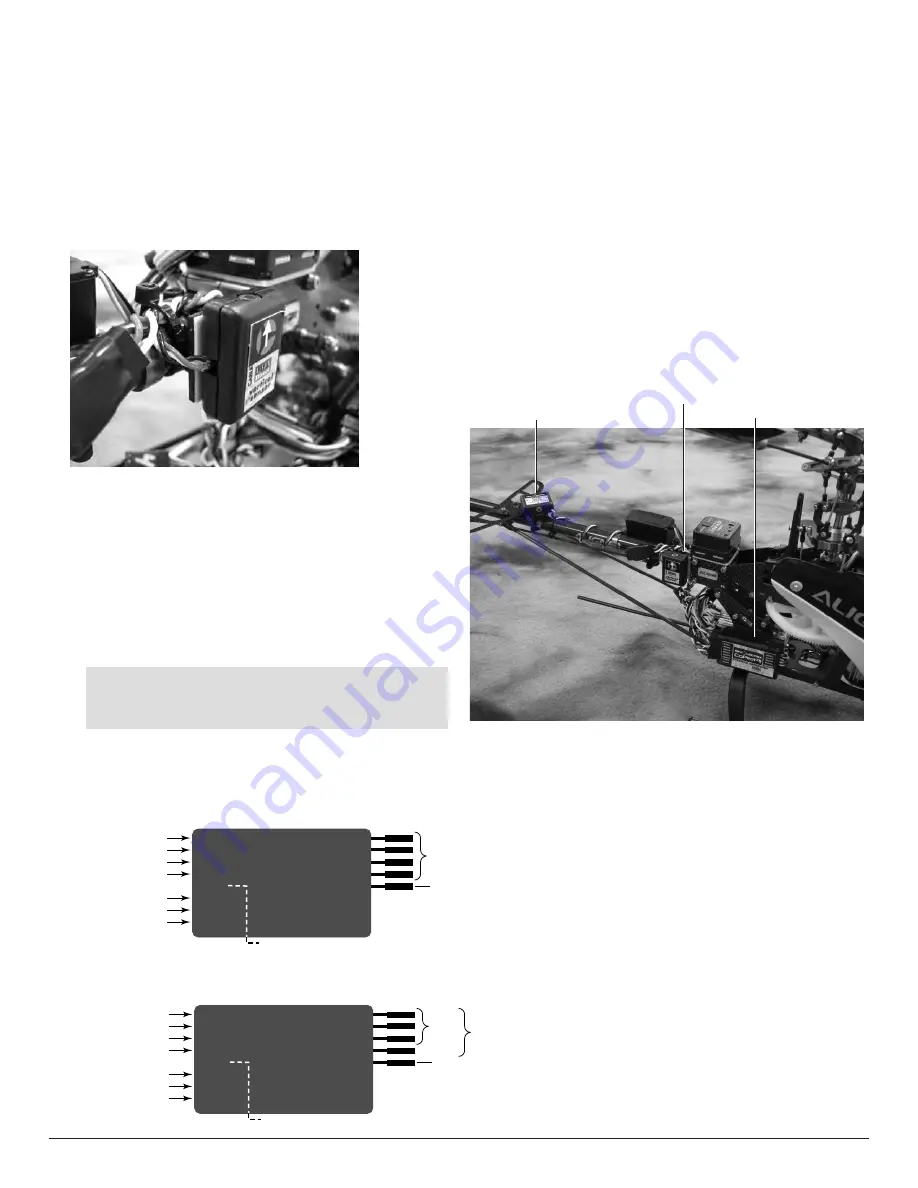
The photo below shows how Co-Pilot components might be
mounted on a helicopter. Your installation may be different from
this.
Notice that the Main Sensor Module is rotated 45° and mounted
in the middle of the boom, well away from anything that would
block its view of the horizon. The Vertical Sensor Module is
mounted so that it has a clear view of the sky and ground.
Vertical Sensor Module
Main Sensor Module
Co-Pilot II Computer
Typical helicopter installation (the IRNet Router is mounted on the frame
on the left side of the helicopter, and is not visible in this photo)
Connecting the components
In an airplane
SVO1
SVO2
SVO3
SVO4
ACCY
IRNET
VERT
MAIN
RCV1
RCV2
RCV3
RCV4
ON/OFF
Connect to
receiver channels
controlling
roll, pitch, yaw
Connect to
receiver channel
for controlling
Co-Pilot remotely
Servo driven by RCV1 input
Servo driven by RCV2 input
Servo driven by RCV3 input
Servo driven by RCV4 input
IRNet Router
Vertical Sensor Module
Main Sensor Module
Connect FUIM2/FUIM3 for Internet Updates
In a helicopter
SVO1
SVO2
SVO3
SVO4
ACCY
IRNET
VERT
MAIN
RCV1
RCV2
RCV3
RCV4
ON/OFF
Connect to receiver
CCPM channels
3 servo
CCPM
*See “If helicopter channels are limited”
Connect FUIM2/FUIM3 for Internet Updates
4 servo
CCPM
Servo driven by RCV1 input
Servo driven by RCV2 input
Servo driven by RCV3 input
Servo driven by RCV4 input
(or gyro, if 3 servo CCPM)*
IRNet Router
Vertical Sensor Module
Main Sensor Module
Connect to
receiver channel
for controlling
Co-Pilot remotely































































