



























2
Description of the safety function STO
Festo – GDCP-CMMP-AS-M0-S1-EN – 1412a – English
13
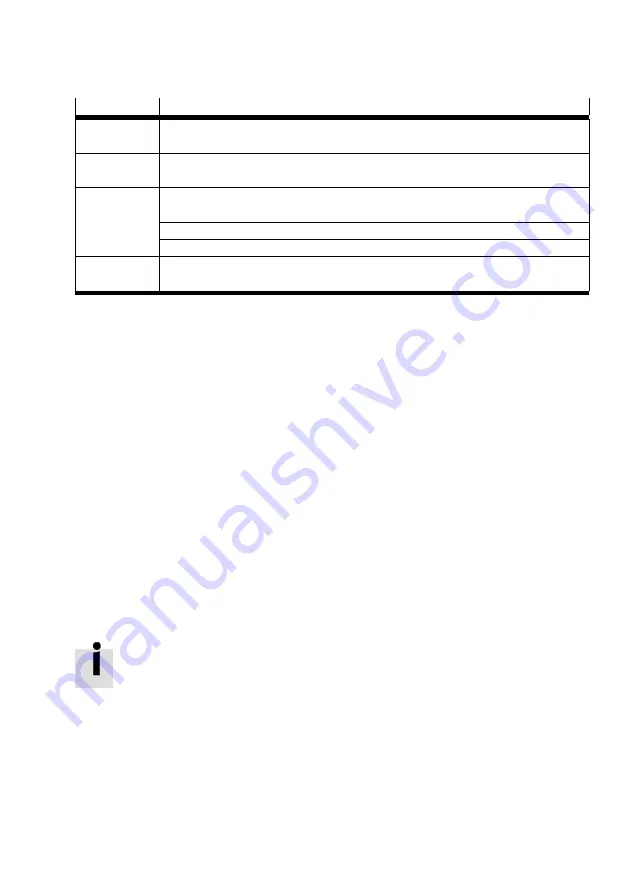
Ports
Description
STO-A (Pin 1)
0V-A (Pin 2)
Control port A for the STO function with corresponding reference potential.
–
Request for “Safe torque off ” (STO) at Low (0 signal), together with STO_B.
STO-B (Pin 3)
0V-B (Pin 4)
Control port B for the STO function with corresponding reference potential.
–
Request for “Safe Torque Off ” (STO) at Low (0 signal), together with STO_A.
C1
(Pin 5)
C2
(Pin 6)
Acknowledgment contact for the “Safe torque off ” (STO) status, e. g. to an external
controller.
–
Acknowledgment contact opened:
“Safe torque off ” (STO) not active
–
Acknowledgment contact closed:
“Safe torque off ” (STO) active
24 V
(Pin 7)
0 V
(Pin 8)
Auxiliary supply, e.g. for safety peripherals (DC 24 V logic supply of the motor
controller).
1)
Control inputs 24 V, high active, based on EN 61131-2, deviating signal level
è
Tab. 2.1
Function of the [X40] connections
The connections are electrically isolated from each other in groups and from the 24 V supply to the
motor controller
è
2.2.3
Control ports STO-A, 0V-A / STO-B, 0V-B [X40]
The safety function STO (safe torque off ) is requested via the two control ports STO-A and STO-B.
These permit the direct connection of safe semiconductor outputs (electronic safety switching devices,
active safety sensors, e. g.light curtains with OSSD signals) and of switch contacts (safety switching
devices with relay outputs, passive safety sensors, e. g. forced position switches)
è
e. g. Sec
To request the safety function STO (safe torque off ), the 24 V control voltage at both control ports
STO-A and STO-B is switched off (0 V).
If the two control ports are switched off simultaneously or within a defined discrepancy time, the STO
function is active. If both channels are not actuated simultaneously, the STO function is nevertheless
active at the first request. If a channel is not switched off, it is interpreted as an error and results in an
error message being issued.
For control ports STO-A and STO-B, an undervoltage monitor is integrated to eliminate the possibility of
invalid voltage ranges for the downstream electronics, as well as an overvoltage monitor to protect
against overvoltage.
Tab. A.5 in Appendix A.1.3 describes the technical data for the control ports.
Tolerance ranges are defined for the input voltage range of control ports STO-A and STO-B. The amount
of energy stored in the motor controller components (e. g. capacitors) depends on the input voltage
level. During switch-off procedures this amount of energy must be discharged. Consequently, switch-off
time values for the transition to the safe state (STO) and the tolerance time vis-a-vis OSSD signals (buf
fer time) depend on the input level.
The time response requirements are contained in the technical specifications in the Appendix A.1.3.







































































