

























ExRobotics B.V.
ExR-2 Robot
Operating Guide
Document No.:
20220412IP1
Version No.: 2
Owner:
Ian Peerless
Date:
2022-04-30
Page 10 of 39
This document is considered an uncontrolled copy when printed. Always ensure that you print and use a current version.
Copyright 2022 ExRobotics B.V.
The LiDAR is tilted down towards the front of the robot so that it can detect the ground close to the
robot in its usual direction of travel.
The tilted LiDAR also means that it can see higher objects behind the robot so it can build a 3D
model of the surroundings with more relief than a horizontally mounted LiDAR. The robot builds
this model as it performs its first remote controlled mission. The robot then uses this model to
navigate during subsequent autonomous missions.
Sometimes there might be temporary items in the surroundings, e.g. people, cars or scaffolding.
These should be minimised as far as possible because they will be incorporated into the 3D model.
However, provided there are
n’t
too many temporary items the robot will still be able to localise its
position using the other information in the map.
Temporary items do not affect object detection and avoidance because these functions are based
on live LiDAR data that is gathered during the ongoing mission. However, it should be remembered
that collision detection and avoidance is
n’
t perfect. The following conditions can hamper
performance.
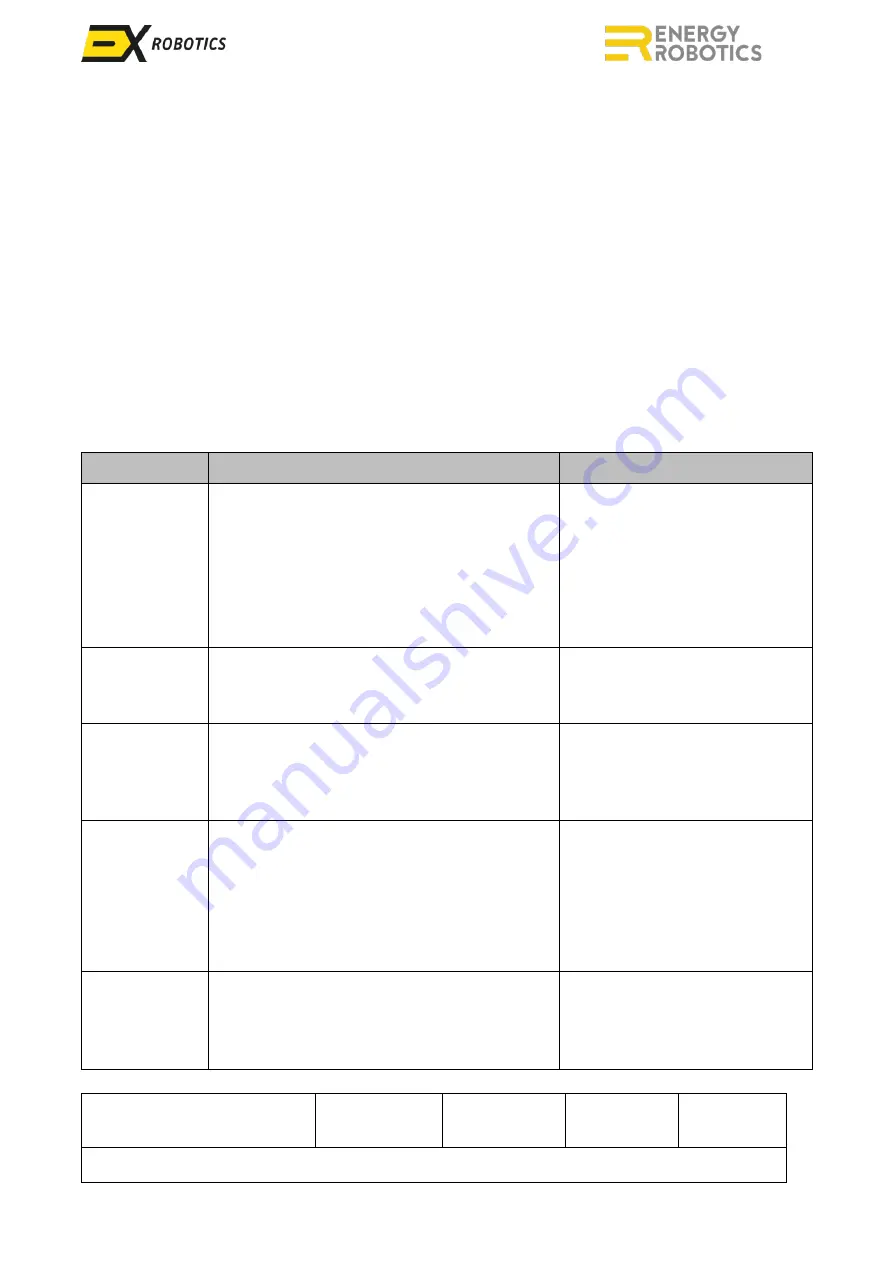
Condition
Description
Potential work-arounds
Drop-offs
Drop-offs are more difficult to detect than
obstacles because if the ground is very
reflective (for instance in heavy rain) there
might be false positives and steep downward
ramps cannot be reliably distinguished from
drop-offs using LiDAR alone.
Drop-offs are usually
permanent features and it
’
s
very serious if the robot drops
from a height. Robot routes
should avoid drop-offs or
barriers should be erected
around them.
Upwards
ramps
The robot will usually interpret these ramps
as an obstacle and stop.
Contact your account manager
to see if the software can be
adjusted.
Narrow gaps
The robot is designed to navigate 1 meter
wide gaps. However some conditions might
prevent this and/or customers may wish to
navigate narrower gaps.
Contact your account manager
to see if the software can be
adjusted.
Thin and small
obstacles such
as vertical
pipes.
Avoidance is optimised to avoid collisions
with a variety of objects. Very small objects
are not considered as increased sensitivity
increases the likelihood of false-positive
avoidance.
If there’s a risk of
collision,
choose a different route or
enclose such items in a larger
“box”.
Avoid leaving small, temporary
items on the robot’s routes.
Sharp turns
The LiDAR cannot see low objects to the side
of the robot. If the robot turns sharply and
the object is within 0.85m of the front of the
robot it may not be detected.
Take this into account when
planning robot routes. Avoid
leaving low, temporary items
near sharp turns.







































































