





























Commissioning and operation
Micropilot FMR20 HART
34
Hauser
As a general rule, the sensor is a slave and transmits information only if a request has
been made by the master. A HART loop can have a maximum of two HART masters at
any one time. With these HART masters, a distinction is made between the primary
master (e.g. the distributed control system) and the secondary master (e.g. handheld
terminal for local operation of the measuring devices). The two masters in the loop/in
the network cannot be masters of the same type, e.g. they cannot be two "secondary
masters". If a third HART master is added to the network, one of the other masters
must be disabled; otherwise a collision occurs in the network. If the process indicator
(RIA15) is operating as a "secondary master", for example, and another "secondary
master" (e.g. a handheld device) is added to the network, the device interrupts HART
communication as soon as it detects the presence of another "secondary master". The
display alternates between error message C970 "Multi master collision" and "- - -". A
measured value is not displayed in this case. The device leaves the HART loop for 30
seconds and then tries to re-establish HART communication once again. Once the
additional "secondary master" is removed from the network, the device continues
communication and displays the measured values of the sensor/actuator once more.
9.3.3
Operating matrix
After power-up:
‣
Press the key twice
The "Level" menu is then available
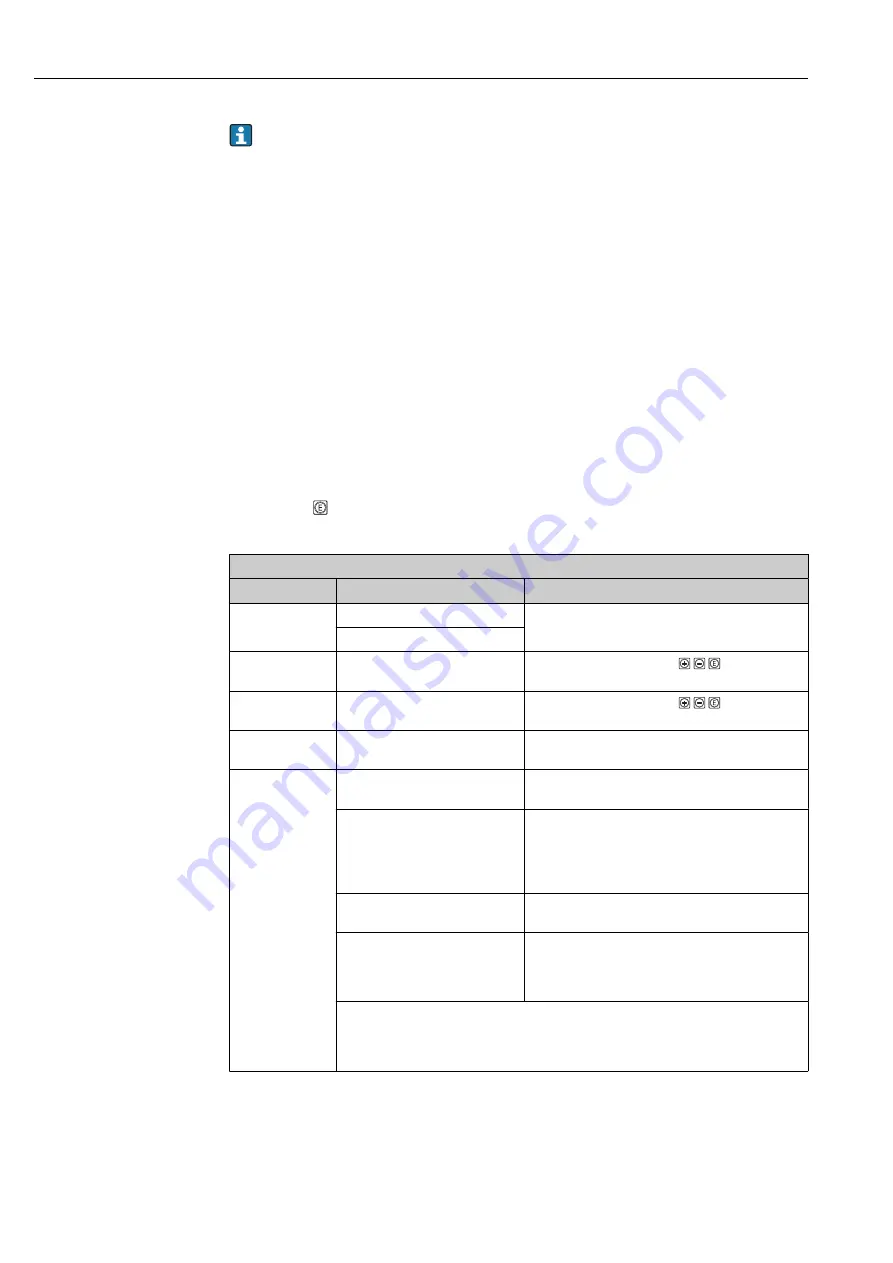
MENU SETUP -> LEVEL
Parameters
Values
Description
UNIT
m
Select the displayed unit
FT
EMPTY
Numeric value 0 to 100 m, default
2 m
Empty calibration using keys , ,
Enter distance from process connection to min. level
FULL
Numeric value 0.001 to 100 m,
default 2 m
Empty calibration using keys , ,
Enter span from max. level to min. level
DIST
Measured value (measured
distance)
MAP
DI OK
To be selected if the distance displayed matches the
actual distance. The device then records a mapping.
MAN
To be selected if the range of mapping is to be
defined manually in the 'Mapping end point'
parameter. A comparison between the distance
displayed and the actual distance is not necessary in
this case. Mapping becomes active after approx. 20 s.
DI UN
To be selected if the actual distance is unknown. No
mapping is recorded.
FACT
To be selected if the present mapping curve (if one
exists) is to be deleted. The device returns to the
"Confirm distance" parameter and a new mapping can
be recorded.
The end point of the current mapping is not indicated in the RIA15. If a new
mapping is performed ("DI OK" or "MAN"), the new mapping is superimposed on the
existing mapping. In order to establish a defined state, perform a factory mapping
("FACT") if required. This deletes any previous mapping.
Содержание Micropilot FMR20
Страница 79: ...Micropilot FMR20 HART Operating menu Endress Hauser 79 User interface 0 to 100 m ...
Страница 101: ......
Страница 102: ...www addresses endress com 71534964 71534964 ...