


























Содержание Arm Robot
Страница 2: ...LANGUAGE INDEX Choose the language SPANISH FRENCH ITALIAN ENGLISH DEUTSCHLAND...
Страница 3: ...ndice Interactivo 3 ARM ROBOT MANUAL...
Страница 5: ...5 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 TUERCA M3 X4 X18 X18 X7 X5 X26...
Страница 10: ...10 ARM ROBOT MANUAL C1 C2 C3 C3 C3 C3 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 D1 D1 D1 D1 D2 D3 D3 D3 D4 D5 D6 C3...
Страница 38: ...38 ARM ROBOT MANUAL...
Страница 39: ...39 ARM ROBOT MANUAL...
Страница 40: ...Interactive index 40 ARM ROBOT MANUAL ENG...
Страница 42: ...42 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 Nuts M3 X4 X18 X18 X7 X5 X26...
Страница 47: ...47 ARM ROBOT MANUAL C1 C2 C3 C3 C3 C3 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 D1 D1 D1 D1 D2 D3 D3 D3 D4 D5 D6 C3...
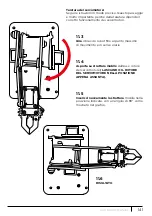
Страница 68: ...68 ARM ROBOT MANUAL STEP 12 Attach the Arm Robot to BASE2 with the screw Servomotor SCREW X1 REQUIRED PIECES...
Страница 75: ...75 ARM ROBOT MANUAL...
Страница 76: ...76 ARM ROBOT MANUAL...
Страница 77: ...Interactif sommaire 77 ARM ROBOT MANUAL FR...
Страница 79: ...79 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 crous M3 X4 X18 X18 X7 X5 X26...
Страница 84: ...84 ARM ROBOT MANUAL C1 C2 C3 C3 C3 C3 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 D1 D1 D1 D1 D2 D3 D3 D3 D4 D5 D6 C3...
Страница 105: ...105 ARM ROBOT MANUAL TAPE 12 Attachez l Arm Robot la BASE2 avec une vis VIS Servomoteur X1 PIECES REQUISES...
Страница 112: ...112 ARM ROBOT MANUAL...
Страница 113: ...113 ARM ROBOT MANUAL...
Страница 114: ...Indice Interattivo 114 ARM ROBOT MANUAL IT...
Страница 116: ...116 ARM ROBOT MANUAL M3 25 M3 10 M3 8 M3 6 M2 5 DADO M3 X4 X18 X18 X7 X5 X26...
Страница 121: ...121 ARM ROBOT MANUAL C1 C2 C3 C3 C3 C3 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 D1 D1 D1 D1 D2 D3 D3 D3 D4 D5 D6 C3...
Страница 142: ...142 ARM ROBOT MANUAL PASSO 12 Fissa la struttura mobile alla BASE2 mediante la vite VITE Servomotore X1 PARTI NECESSARIE...
Страница 149: ...149 ARM ROBOT MANUAL...
Страница 150: ...150 ARM ROBOT MANUAL...
Страница 151: ...Interaktive Index 151 ARM ROBOT MANUAL DE...
Страница 158: ...158 ARM ROBOT MANUAL C1 C2 C3 C3 C3 C3 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 D1 D1 D1 D1 D2 D3 D3 D3 D4 D5 D6 C3...
Страница 188: ...Arm Robot Electronic and programming kit Arm Robot and double joystick gamepad ebotics com...


































































