





























EC5000
-
42
-
-
43
-
Description of Functional Parameter
5
EC5000
Description of Functional Parameter
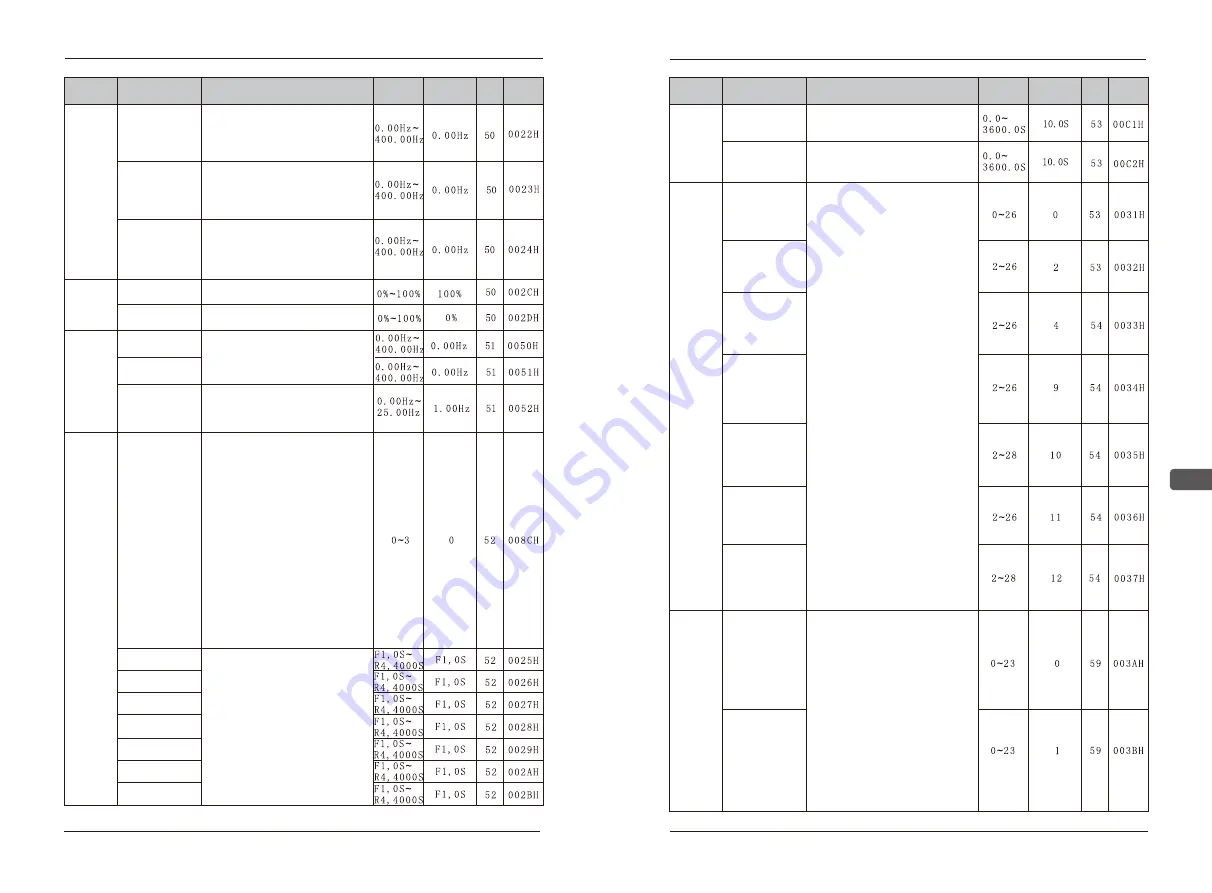
Function
Parameters
Name
Description
Setting
range
Default Page Address
Frequency
command
setting
A32 Frequency 1
Unit:1%
A33 Frequency 2
A34 JOG
frequency
A35 Frequency
upper limit
External control instruction 6 or
multi-speed control step 6 more
frequency of effective frequency 6
instructions.
External control instruction 7 or
multi-speed control step 7 more
frequency of effective frequency 7
instructions.
External Jog frequency control, or
the keyboard Jog frequency, or the
effective Fre order is the Fre of the
external multi-speed control step 8.
Output
frequency
limit
A36 Frequency
lower limit
Unit:1%
Jumping frequency point of instruc-
tion. When set this value to be
0.00HZ, this function is not working.
A37 Jump
Frequency 1
Jump
frequency
control
A38 Jump
Frequency 2
A39 Jump
Frequency
bandwidth
The Fre range of the jump frequency.
When set this value to be 0.00HZ,
this function is not working.
Sample
PLC
operation
setting
A40 running
mode
0:run according to common control
way
1:inner control multi-speed, this
mode stops after running for one
week AC drive runs with the inner
data step by step when run order is
given. It stop running automatically
one week later. AC drive restart
when running order is given again.
2:Inner control multi-speed: when
repeated running order is given, AC
drive repeat running step by step
according to the inner data. Orders
are not accepted except order of
STOP, External Error Instant STOP
when AC drive is running.
3:Inner control multi-speed: after
running order is given, AC drive runs
the inner data step by step. It runs
with the last speed after one week.
A41 Step 1
A42 Step 2
A43 Step 3
A44 Step 4
A45 Step 5
A46 Step 6
A47 Step 7
Example: F 2 100
100:pace running time:100S
2:pace accelerate/retard time 2
F:pace motor running direction: F is
CCW, R is CW
Function
Parameters
Name
Description
Setting
range
Default Page Address
JOG
accele-
ration
and
decele-
ration
time
A48 JOG
acceleration
A49 JOG
deceleration
JOG acceleration time, the max
frequency:100%
Unit: 0.1S
JOG deceleration time, the max
frequency:100%
Unit: 0.1S
Multi-
function
input
selection
B01 S2 Function
0:Reverse run (2-wire sequence)
1:Fwd / Rev command (3-wire
sequence)
2:External fault (normally open)
3:External fault (normally closed)
4:Fault reset
5:Local/remote selection
6:Transmit/control circuit terminal
selection
7:Abnormal stop
8:Main Frequency order input
selection
9:Multi-speed order 1/SS1
10:Multi-speed order 2/SS2
11:Multi-speed order 4/SS4
12:Jog reference
13:Accelerate/retard time selection
1/RT1
14:Accelerate/retard time selection
2/RT2
15:External BB(ON joint input)
16:External BB(OFF joint input)
17:Speed Search from max
frequency
18:Speed Search from set
frequency
19:Parameter setting enable /
disable
20:PID integral value reset
21:PID control disable
22:Timer function
23:External overheat alarm (OH3)
24:Analog reference sample hold
command
25:Inertia ridethrough command
(normally open)
26:Inertia ridethrough command
(normally closed)
27:UP/DOWN order
28:JOG inversion
B02 S3 Function
B03 S4 Function
B04 S5 Function
B05 S6 Function
B06 S7 Function
B07 S8 Function
Multi-
function
output
selection
B08 Y1 Function
0:Fault
1:During running
2:Frequency agree
3:Desired frequency agree
4:Frequency detection 1(Output
Fre≤Any Fre)
5:Frequency detection 2(Output
Fre≥Any Fre)
6:Over/Undertorque detection
(normally open)
7:Over/Undertorque detection
(normally closed)
8:BB
(
base level blockade
)
9:Running mode
10:AC drive run ready
11:Timer function
12:Automatic restart
13:OLoverloadalarm
B09 Y2 Function