





























3.4 Front View
E30BC325.11
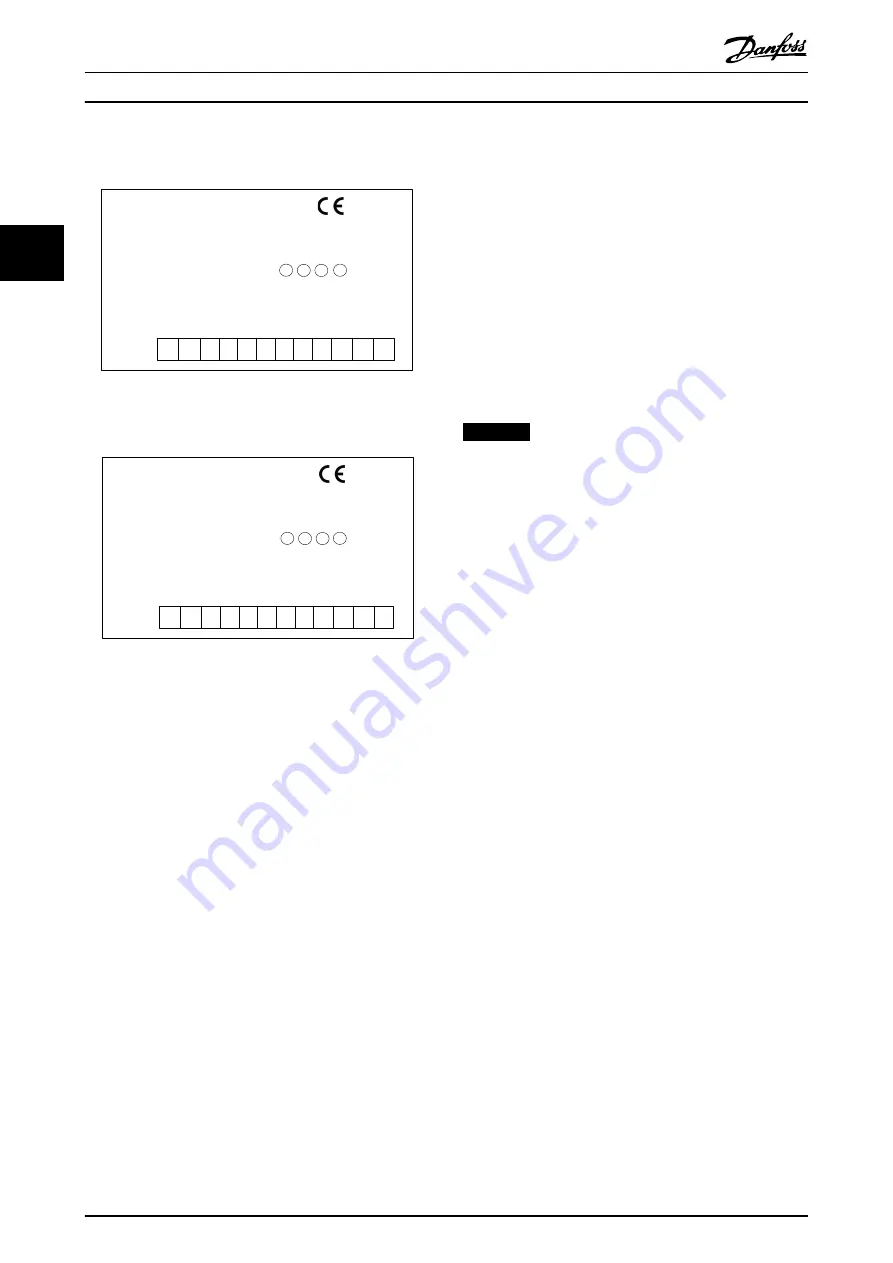
MCB 150
Safe Option
SW. ver. xx. xx
Option B
130B3280
LED:
1 2
3
4
TTL Enc. interface
Y30/
D
I1
A
G
N
D
D
I1
B
EN
C
A
D
I2
A
EN
C
nA
EN
C
B
D
I2
B
EN
C
nB
24
V
G
N
D
S3
7
1
2
3
4
5
6
7
8
9 10 11 12
Illustration 3.4 MCB 150
E30BC326.11
MCB 151
Safe Option
SW. ver. xx. xx
Option B
130B3290
LED:
1 2
3 4
HTL Enc. interface
Y31/
D
I1
A
G
N
D
D
I1
B
EN
C
A
D
I2
A
EN
C
B
D
I2
B
24
V
G
N
D
S3
7
1
2
3
4
5
6
7
8
9 10 11 12
G
N
D
G
N
D
Illustration 3.5 MCB 151
3.5 Categories of Safe Stop
International standard EN/ISO 13850 specifies the
functional requirements and design principles of
emergency stop devices.
It applies to all machines, whatever type of energy is used
to control this function.
The standard allows 2 types of stop
•
Category 0 stop: Stopping by immediately
cutting-off power or mechanical disconnection
between the dangerous components
•
Category 1 stop: Controlled stopping with power
maintained to the actuator to achieve stopping
(braking for example), then cut-off of power
when zero speed is reached.
During a category 0 stop, the motor coasts down in an
uncontrolled way. If access to the machine coasting down
involves a hazard (results of the hazard and risk analysis),
take protective measures to avoid the hazard.
Refer to EN IEC 61800-5-2:2007 (4.2.2.2) for a definition of
Safe Torque Off (STO).
A Category 1 stop triggers a controlled stop. The safety
option monitors the controlled stop. If a power outage or
an error occurs, a controlled stop is impossible. Trigger the
safety function Safe Torque Off after the stop to shut off
the motor torque.
Refer to EN IEC 61800-5-2:2007 (4.2.2.3) for a definition of
Safe Stop 1 (SS1).
An evaluation of the machine-related risks determines
which of the 2 stopping methods to use.
NOTICE
When designing the machine application, consider
timing and distance for a coast to stop (Stop Category 0
or Safe Torque Off). For more information regarding stop
categories, refer to EN IEC 60204-1.
3.5.1 Operation and Requirements
The safety option is redundant and self-checking. It
requires digital input signals from an input sensor (e.g.,
PNP proximity switch) or higher resolution TTL or HTL
encoders to monitor for either safe stop or speed
conditions.
3.5.2 Safety Functions
Safety functions maintain a safe condition or prevent
hazardous conditions from arising. The safety functions for
frequency converters are defined in EN IEC 61800-5-2.
The safety option implements the following safety
functions
•
Safe Torque Off (STO)
-
No power is being fed to the motor
which can generate a rotation. Stop
category 0 to EN IEC 60204-1
•
Safe stop 1 (SS1)
-
Motor decelerates. Monitoring of
deceleration ramp and Safe Torque Off
following zero speed, or Safe Torque Off
at the end of a deceleration time. Stop
category 1 to EN IEC 60204-1
•
Safely limited speed (SLS)
-
Prevents exceeding a defined speed
value
Functions and System Overvi...
Operating Instructions
14
Danfoss A/S © Rev. 2014-02-11 All rights reserved.
MG34W302
3
3







































































