





























ComNav G2 & G2B Installation & Operation
Document PN 29010093 V1.5
- 54 -
16 December 2016
Each time constant – called “something” TAU – is a value that sets the length of a simple
averaging filter for that specific output. For example, the default value of HTAU tells the G2
to smooth heading outputs with a filter that is 2.0 seconds in length.
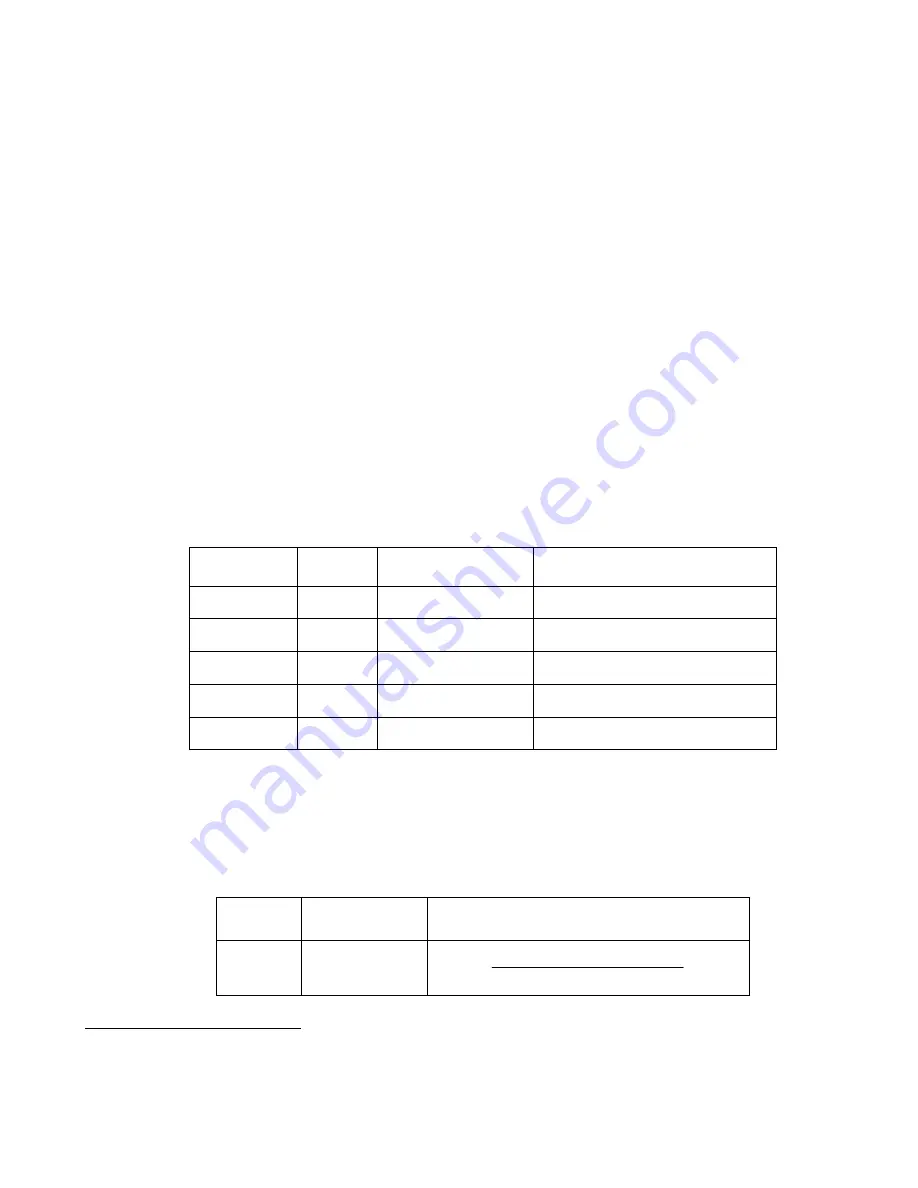
Table 11 (on the next page) describes all the time constants.
Changing the Time Constants
The G2’s default time constant settings are fine for most users.
But you can set the time constants to be a better match to the dynamics of your vessel, if you
like.
•
For instance, if the vessel is very large and is not able to turn quickly, increasing the
heading time constant (HTAU) might be useful. The resulting heading values would
have less apparent jitter
1
, and be more consistent – both from moment to moment
and over longer periods of time as the vessel moves – with the vessel’s “real”
heading.
•
On the other hand, increasing a time constant also increases the G2’s time lag in
responding to actual changes in the value being measured – i.e., it takes longer for a
“real change” in the value being measured to show up in the G2’s output data.
Worse, increasing a time constant too far could create an unacceptable lag in the
measurement – to the point where the navigation equipment that is receiving data
from the G2 would begin to be adversely affected.
– For example, an autopilot will begin to appear sluggish in its steering
performance, if the heading time constant is increased too far. That’s because
the time lag on heading will become so large that the autopilot cannot “see” small
changes in heading quickly (or perhaps even not at all).
Measurement
Time
Constant
Sentences Affected
Usage
Course Over
Ground
COGTAU
$GPVTG
•
If the vessel is resistant to quick
changes in its motion, increase it.
Heading
HTAU
$GPHDT, HDG, HDM
•
If vessel does not turn quickly,
increase it.
Rate Of Turn
HRTAU
$GPROT
•
If vessel does not turn quickly,
increase it.
Pitch (or Roll)
PTAU
$PCMN,HPR
•
If vessel does not pitch (roll)
quickly, increase it.
Speed
SPDTAU
$GPRMC, VTG
•
If the vessel does not change
speed quickly, increase it.
Table 11 – Smoothing Time Constants
If your vessel is small and highly manoeuvrable, or if you are unsure of how changing these
values will affect your vessel (and the other navigation equipment you have on-board), it is
probably best to be conservative and leave the time constants at the default settings.
But, if you do wish to change any of the G2’s time constants, the next table provides some
formulae for figuring out an optimal value of each constant.
Time
Constant
Range
(seconds)
Formula
1
COGTAU
0.02 to 60
•
default: 2.0
sec)
/
(in
turn
of
rate
max
20
°
1
There will always be some residual jitter in computed-heading data, even with the G2’s sophisticated RTK algorithms.
It’s an unavoidable effect of the physics & underlying mathematics of the overall GPS system.
Содержание Vector G2
Страница 2: ......
Страница 6: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 4 16 December 2016...
Страница 12: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 10 16 December 2016...
Страница 13: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 11 16 December 2016 Introduction...
Страница 14: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 12 16 December 2016...
Страница 18: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 16 16 December 2016 Installation...
Страница 19: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 17 16 December 2016...
Страница 43: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 41 16 December 2016 Operation...
Страница 44: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 42 16 December 2016...
Страница 58: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 56 16 December 2016 Care Maintenance...
Страница 59: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 57 16 December 2016...
Страница 61: ...ComNav G2 G2B Installation Operation Appendices Document PN 29010093 V1 5 59 16 December 2016 Appendices...
Страница 75: ...ComNav G2 G2B Installation Operation CE Compliance Statement Document PN 29010093 V1 5 73 16 December 2016...
Страница 83: ...ComNav G3 G3B Installation Operation Document PN 29010093 V1 5 81 16 December 2016...
Страница 84: ...ComNav G3 G3B Installation Operation Document PN 29010093 V1 5 82 16 December 2016 Index...
Страница 85: ...ComNav G3 G3B Installation Operation Document PN 29010093 V1 5 83 16 December 2016...
Страница 87: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 85 16 December 2016...
Страница 88: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 86 16 December 2016 User Notes...
Страница 89: ...ComNav G2 G2B Installation Operation Document PN 29010093 V1 5 87 16 December 2016...
Страница 92: ...ComNav G2 G2B Installation Operation User Notes Document PN 29010093 V1 5 90 16 December 2016 Notes...
























































