





























Website:-www.bholanath.in
E-mail id:[email protected]
18
Write Single Bit Parameter (Relay):
Function Code 0x05
Request
Function code
1 Byte
0x05
Starting Address
2 Bytes
0x0000 to 0xFFFF
Output Value
2 Bytes
0x0000 or 0xFF00
Response
Function code
1 Byte
0x05
Starting Address
2 Bytes
0x0000 to 0xFFFF
Output Value
2 Bytes
0x0000 or 0xFF00
Error
Error code
1 Byte
0x85
Exception code
1 Byte
01 or 02 or 03 or 04
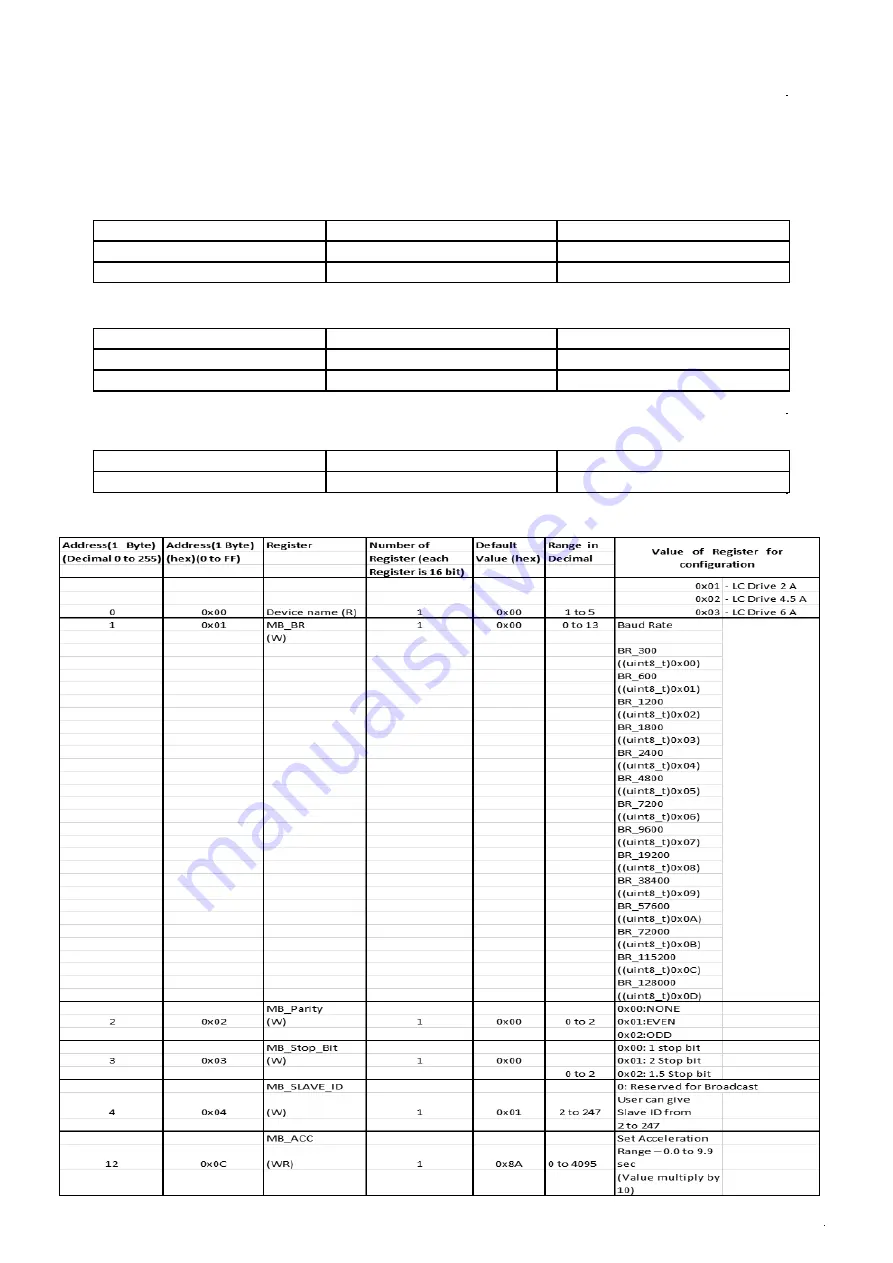
14.Single Register Parameters:







































































