





























Parameterization and commissioning
EL6751
94
Version: 3.5
Network Status
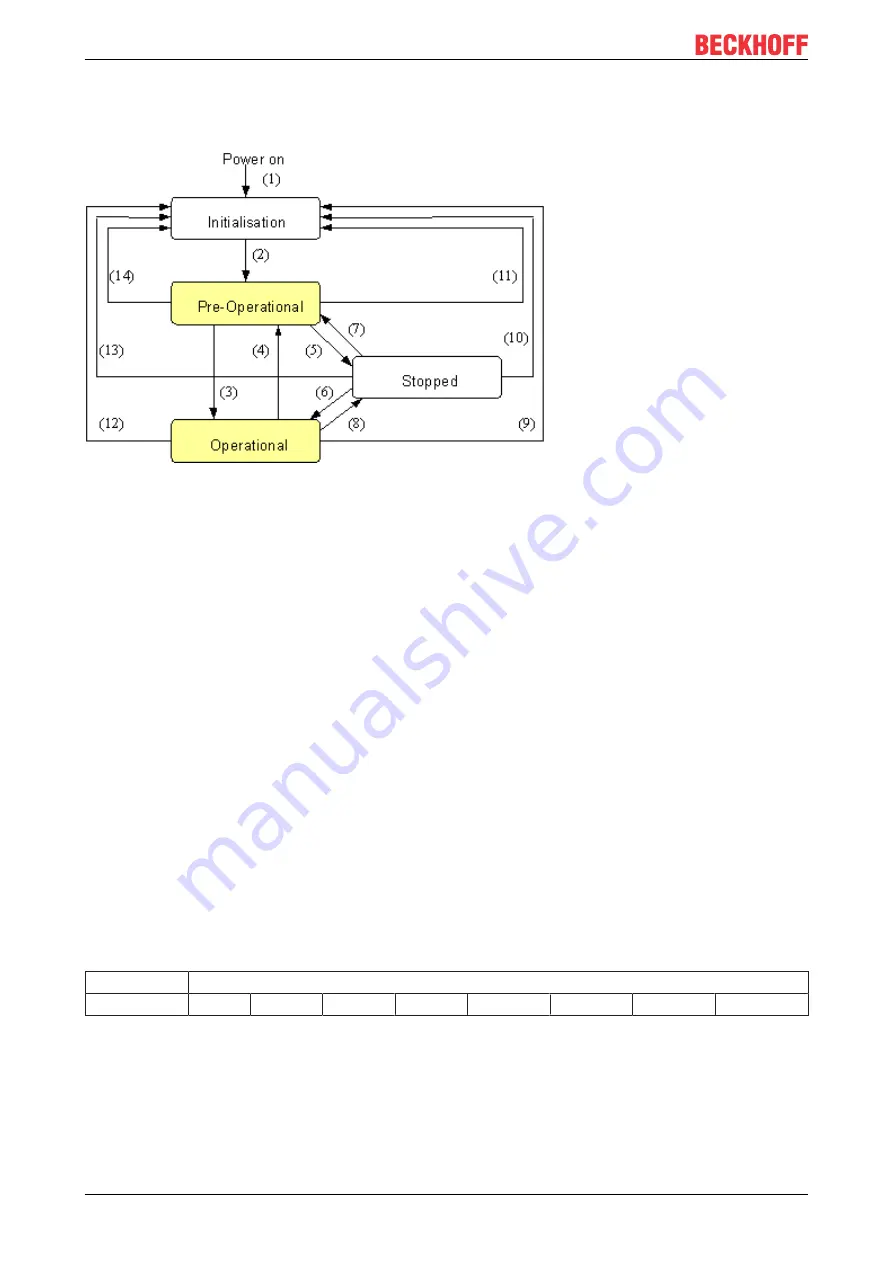
The states and the state transitions involved as CANopen boots up can be seen from the state diagram:
Fig. 111: CANopen bootup state diagram
Pre-Operational
After initialization the Bus Coupler goes automatically (i.e. without the need for any external command) into
the
Pre-Operational
state. In this state it can be configured, since the service data objects (SDOs) are
already active. The process data objects, on the other hand, are still locked.
Operational
In the
Operational
state the process data objects are also active.
If external influences (such as a CAN error, or absence of output voltage) or internal influences (such as a K-
Bus error) mean that it is no longer possible for the Bus Coupler to set outputs, to read inputs or to
communicate, it attempts to send an appropriate emergency message, goes into the error state, and thus
returns to the
Pre-Operational
state. In this way the NMT status machine in the network master can also
immediately detect fatal errors.
Stopped
In the
Stopped
state (formerly:
Prepared
) data communication with the Coupler is no longer possible - only
NMT messages are received. The outputs go into the fault state.
State Transitions
The network management messages have a very simple structure: CAN identifier
0
, with two bytes of data
content. The first data byte contains what is known as the command specifier (cs), and the second data byte
contains the node address, the node address
0
applying to all nodes (broadcast).
11 bit identifier 2 byte user data
0x00
cs
Node ID
The following table gives an overview of all the CANopen state transitions and the associated commands
(command specifier in the NMT master telegram):







































































