





























Spatial Reference Manual
Page 30 of 158
Version 4.4
04/06/2019
8 Specifications
8.1
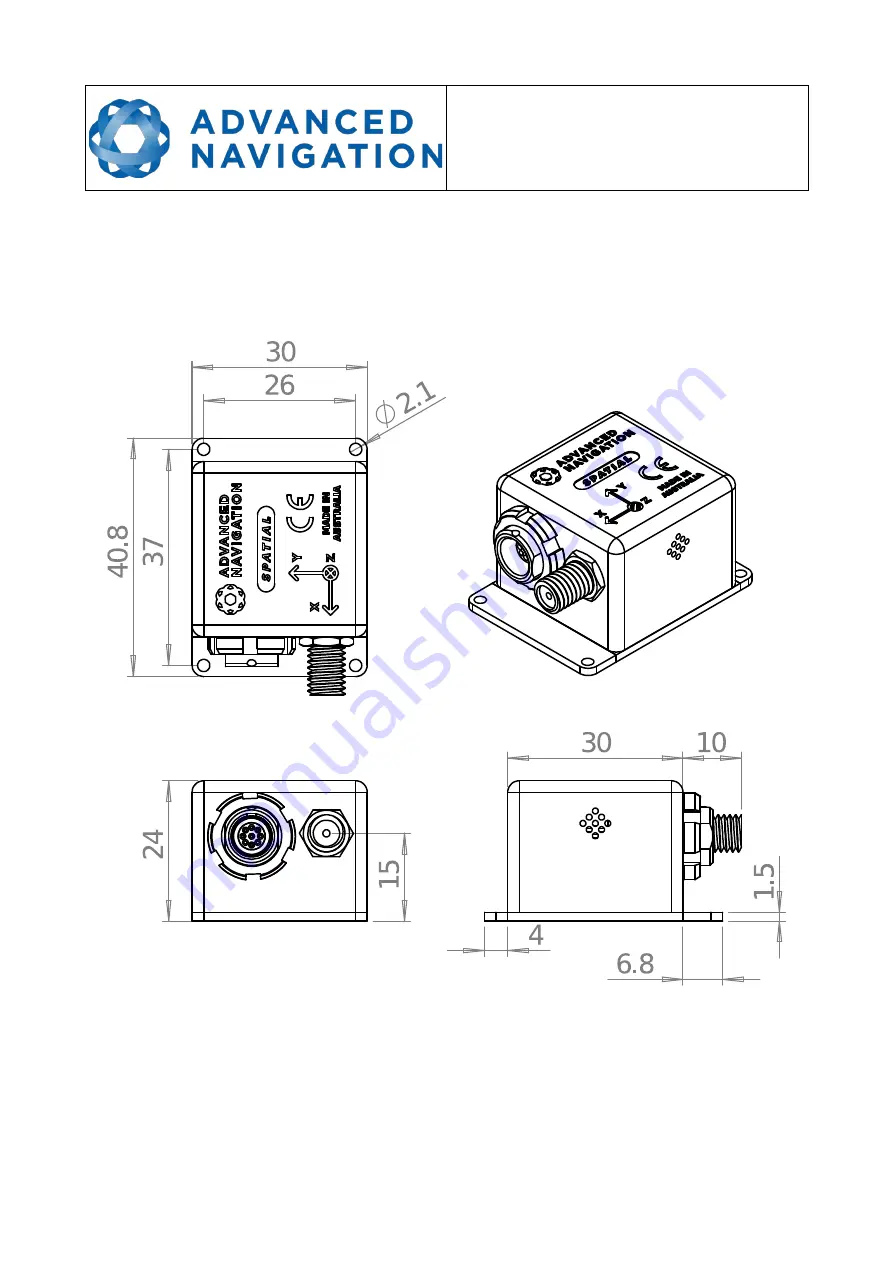
Mechanical Drawings
Illustration 8: Mechanical drawings of Spatial
Spatial Reference Manual
Page 30 of 158
Version 4.4
04/06/2019
8 Specifications
8.1
Mechanical Drawings
Illustration 8: Mechanical drawings of Spatial





















































