





























ENGLISH
8
Commissioning
4.5.2
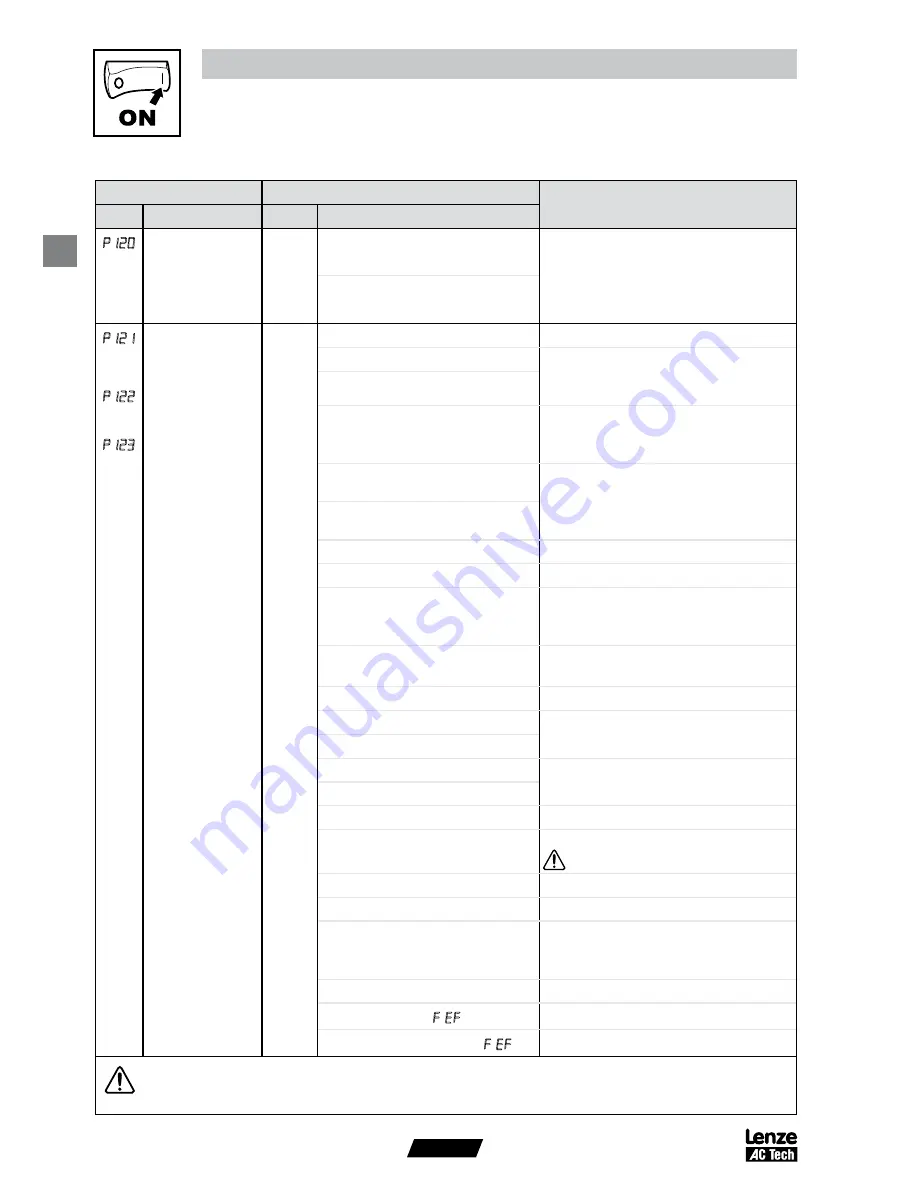
I/O Setup Parameters
Code
Possible Settings
IMPORTANT
No.
Name
Default Selection
Assertion Level
2
Low
P20 and the Assertion Level switch
must both match the desired assertion
level unless P00, P2…P2 are
all set to 0. Otherwise an F.AL fault
will occur.
2 High
TB-A Input
Function
TB-B Input
Function
TB-C Input
Function
0
0 None
Disables input
AUTO Reference: 0-0 VDC
For frequency mode, see P0...P,
For PID mode, see P204…P205,
For vector torque mode, see P0
2 AUTO Reference: 4-20 mA
AUTO Reference: Preset
For frequency mode see P...P7,
For PID mode, see P2…P2,
For torque mode see, P…P
4 AUTO Reference: MOP Up
• Normally open: Close input to
increase or decrease speed, PID
setpoint or torque setpoint.
• MOP Up is not active while in STOP
5 AUTO Reference: MOP Down
AUTO Reference: Keypad
7 AUTO Reference: Network
8 Control Select
Use when P00 = 4, 5 to switch
between terminal strip control and local
or remote keypad control.
9 Network Enable
Required to start the drive through the
network.
0 Reverse Rotation
Open = Forward Closed = Reverse
Start Forward
See note for typical circuit
2 Start Reverse
Run Forward
See note for typical circuit
4 Run Reverse
5 Jog Forward
Jog Forward speed = P4
Jog Reverse
Jog Reverse speed = P5
Active even if P2 = 0
7 Accel/Decel #2
See P25, P2
8 DC Brake
See P74; close input to override P75
9 Auxiliary Ramp to Stop
Normally closed: Opening input will
ramp drive to STOP according to P27,
even if P is set to Coast (0 or ).
20 Clear Fault
Close to reset fault
2 External Fault .
Normally closed circuit; open to trip
22 Inverse External Fault .
Normally open circuit; close to trip
WARNING!
Jog overrides all STOP commands! To stop the drive while in Jog mode, the Jog input must be
deactivated or a fault condition induced.





















































