




















6
Introduction to the manual
3ADW0005Q964 E-Stop cat.1 without opening mains contactor en b
Abbreviations
Abbreviations used in this manual are listed below.
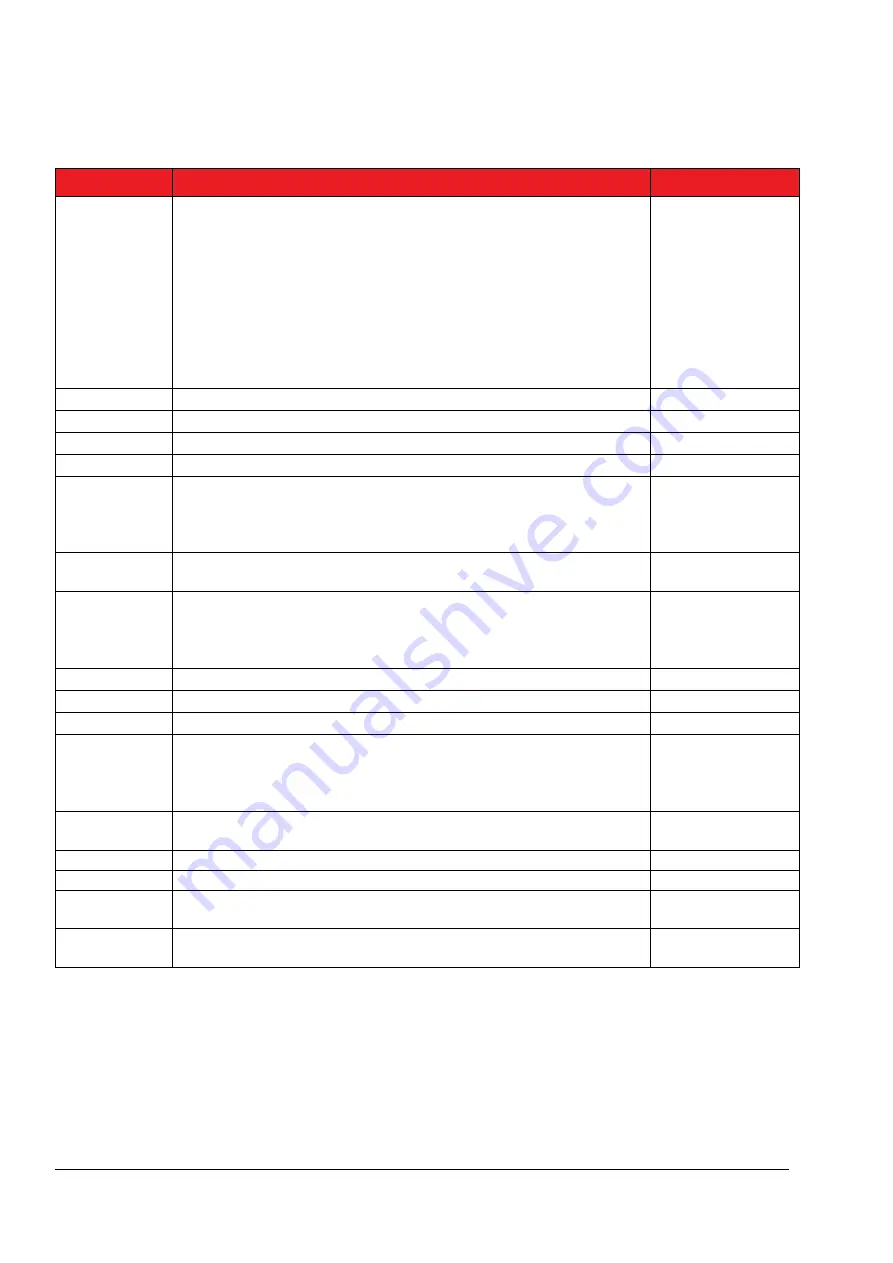
Abbreviation
Description
Reference
Cat.
Category
1. Stop category according to EN/IEC 60204-1
The stop categories are: 0 (uncontrolled stop) and 1 (controlled
stop)
2. Classification of the safety-related parts of a control system in
respect of their resistance to faults and their subsequent
behavior in the fault condition, and which is achieved by the
structural arrangement of the parts, fault detection and/or by
their reliability.
The categories are: B, 1, 2, 3 and 4.
EN/IEC 60204-1
EN ISO 13849-1
CCF
Common cause failure (%)
EN ISO 13849-1
DC
Diagnostic coverage
EN ISO 13849-1
DI
Digital input
E-stop
Emergency stop
Frame (size)
Relates to the construction type of the drive in question. For
example, several drive types with different power ratings can
have the same basic construction, and a frame size is used in
reference to all those drive types.
HFT
Hardware fault tolerance
IEC 61508,
EN/IEC 62061
PFH
Probability of dangerous failures per hour
IEC 61508,
EN ISO 13849-1,
EN/IEC 62061,
EN/IEC 61800-5-2
PL
Performance level (levels are: a, b, c, d and e). Corresponds to SIL. EN ISO 13849-1
RO
Relay output
SC
Systematic capability
IEC 61508
SIL
Safety integrity level
IEC 61508,
IEC 61511,
EN/IEC 62061,
EN/IEC 61800-5-2
SILCL
Maximum SIL that can be claimed for a safety function or
subsystem
EN/IEC 62061
SS1
Safe stop 1
EN/IEC 61800-5-2
STO
Safe torque off
EN/IEC 61800-5-2
T
1
Proof test interval or lifetime (the smaller one)
IEC 61508,
EN/IEC 62061
Off3
Function in Drive: Emergency stop with configurable
deceleration time according to Cat. 1.
Profibus standard
Exclusion of liability
ABB is not responsible for the implementation, verification and validation of the overall safety system.
It is the responsibility of the system integrator (or other party) who is responsible for the overall system
and system safety. The system integrator (or other responsible party) must make sure that the entire
implementation complies with all relevant standards, directives and local electrical code, and that the
system is tested, verified and validated correctly.







































































