





























2.4.4 Filtering data
Filtering data
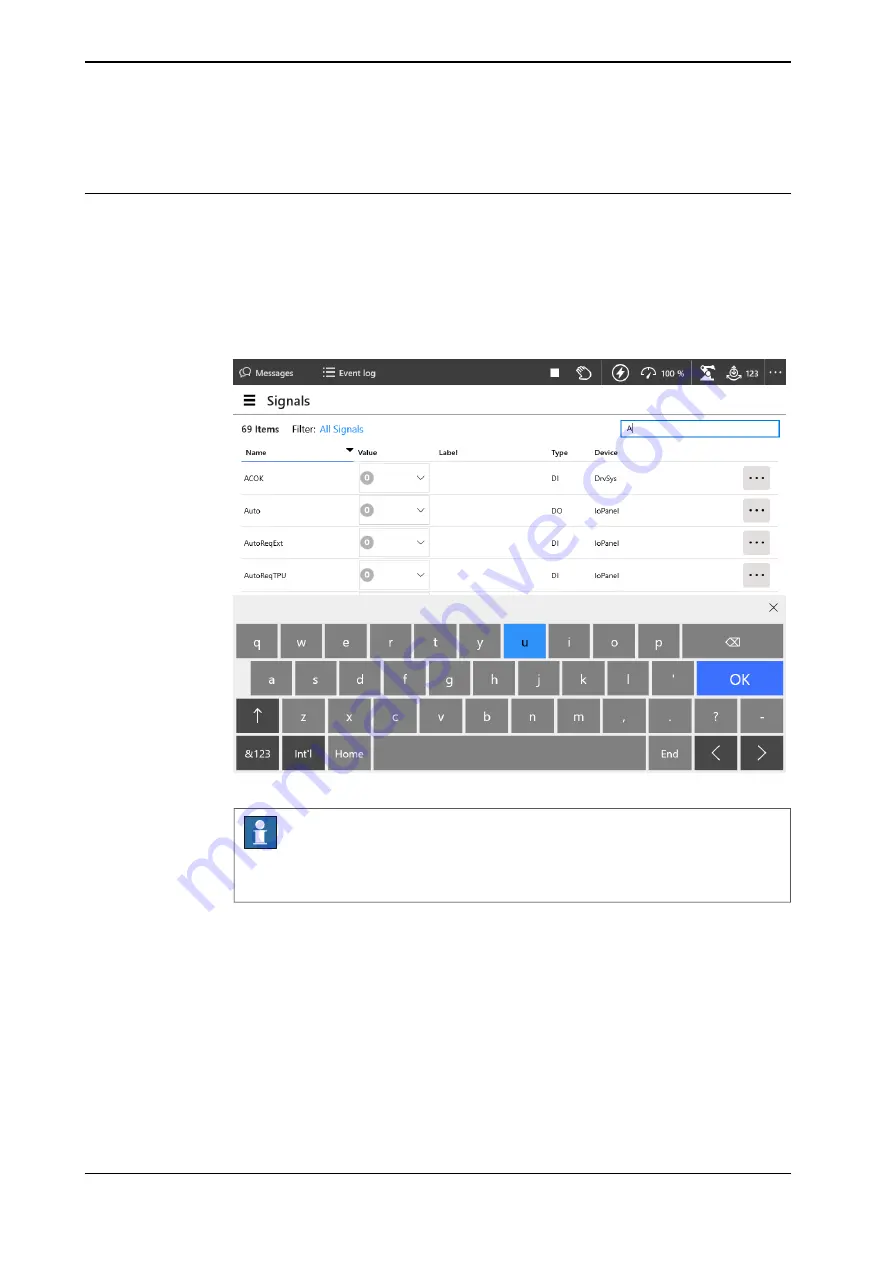
In several of the FlexPendant menus you can use filtering. This can be useful when
you are looking at instances of a data type when there are many instances available.
By filtering instances starting with a specific character for example, the number of
items can be greatly reduced.
Depending on the type of data, you can filter data either alphabetically or
numerically.
xx2000000926
Note
When filtering I/O signals there are more options than other types of data. For
example, you can filter data by
Name
or
Type
56
Operating manual - OmniCore
3HAC065036-001 Revision: J
© Copyright 2019-2021 ABB. All rights reserved.
2 Navigating and handling the FlexPendant
2.4.4 Filtering data
Содержание OmniCore
Страница 1: ...ROBOTICS Operating manual OmniCore ...
Страница 2: ...Trace back information Workspace 21D version a1 Checked in 2021 11 26 Skribenta version 5 4 005 ...
Страница 8: ...This page is intentionally left blank ...
Страница 24: ...This page is intentionally left blank ...
Страница 62: ...This page is intentionally left blank ...
Страница 72: ...This page is intentionally left blank ...
Страница 98: ...This page is intentionally left blank ...
Страница 234: ...This page is intentionally left blank ...
Страница 242: ...This page is intentionally left blank ...
Страница 264: ......
Страница 265: ......


































































