





























Robot target edit
Procedure
Action
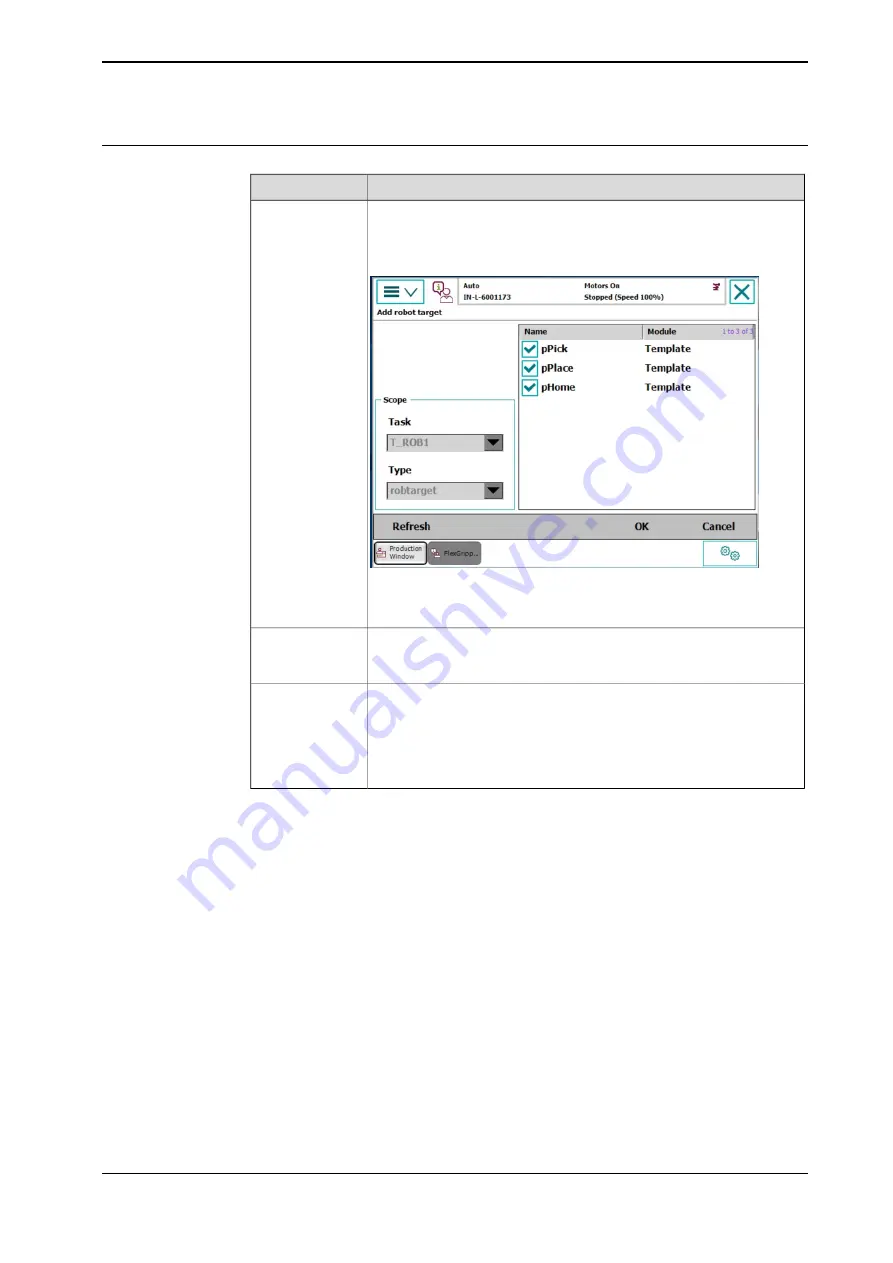
Touch the Add target button, in the screen shown, the left side shows
the target contribution, i.e. Task, Type, the right side shows the target
list with the module described. Select the target needed, which is then
ticked in the square before its name.
Add target
The targets listed are selected by default. Touch the target to remove
the tick and deselect a target. Select OK, the selected targets are added
to the Choose robot target column.
Touch the Teach button, the selected robot target position is taught.
Meanwhile the corresponding parameters of the TCP are automatically
loaded into the Pos offset column.
Teach target
After target teach, if the robot doesn’t reach the exact position, the
offset function can be used to fine tune the robot target.
Target position
offset
In the Pos offset column, touching the plus sign increases the position
in mm and the minus sign decreases it. The increment unit can be ad-
justed in 0.1mm, 0.5mm, 1mm or 5mm. After the offset, touch Apply,
the offset target is saved.
Product Manual - FlexGripper-Claw
101
4GAA40401009901-001 Revision: A
© Copyright 20132019 ABB. All rights reserved.
3 FlexGripper UI
3.2.3.1 Position Tune
Continued
Содержание FlexGripper
Страница 1: ...ROBOTICS Product Manual FlexGripper Claw ...
Страница 112: ...This page is intentionally left blank ...
Страница 114: ......
Страница 115: ......