


















CANFDNET-400U
High-performance Four-channel CANFD Bus-to-Ethernet Converter User Manual
©2021 Guangzhou ZLG Microelectronics Technology Corp.,Ltd.
33
User Manual
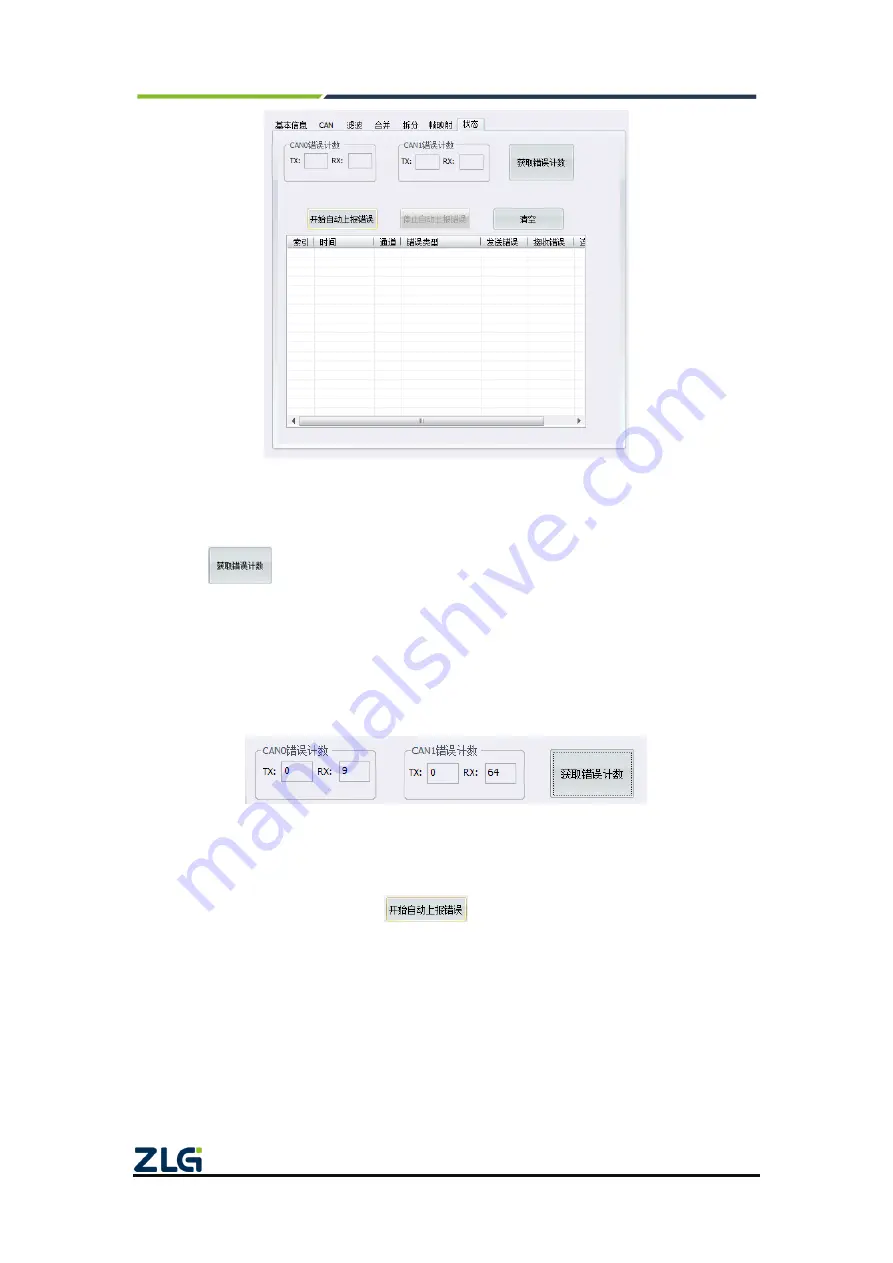
Figure 4.42 Status interface
4.4.1 Obtaining the Device CAN Interface Error Count
Click
shown in Figure 4.43 to read the receive error count and send error
count of the CAN channel in real time. These error counts directly reflect the smoothness
of the bus. When the received error value is greater than 127, the bus is almost paralyzed.
When the error value is high (above 40), the bus communication is blocked seriously. At
this time, adjust the baud rate value of the bridge or increase the number of bridges. When
the bus communication is good, the error count can generally be maintained at 0. The
send error count is similar to the receive error count.
Figure 4.43 Obtaining the error count
4.4.2 Real-time reporting of device status
As shown in Figure 4.44, click
to enable automatic error reporting. At
this time, if an error occurs in the device communication, the error will be automatically
reported to the computer and recorded in the table. In the recording, it will record the error
time (based on the computer time), channel number, error type, send error count, receive
error count and continuous error count and other information. The information helps
analyze the failure of communication.