





























Page 64 MS-SOUND decoders MS440 to MS990
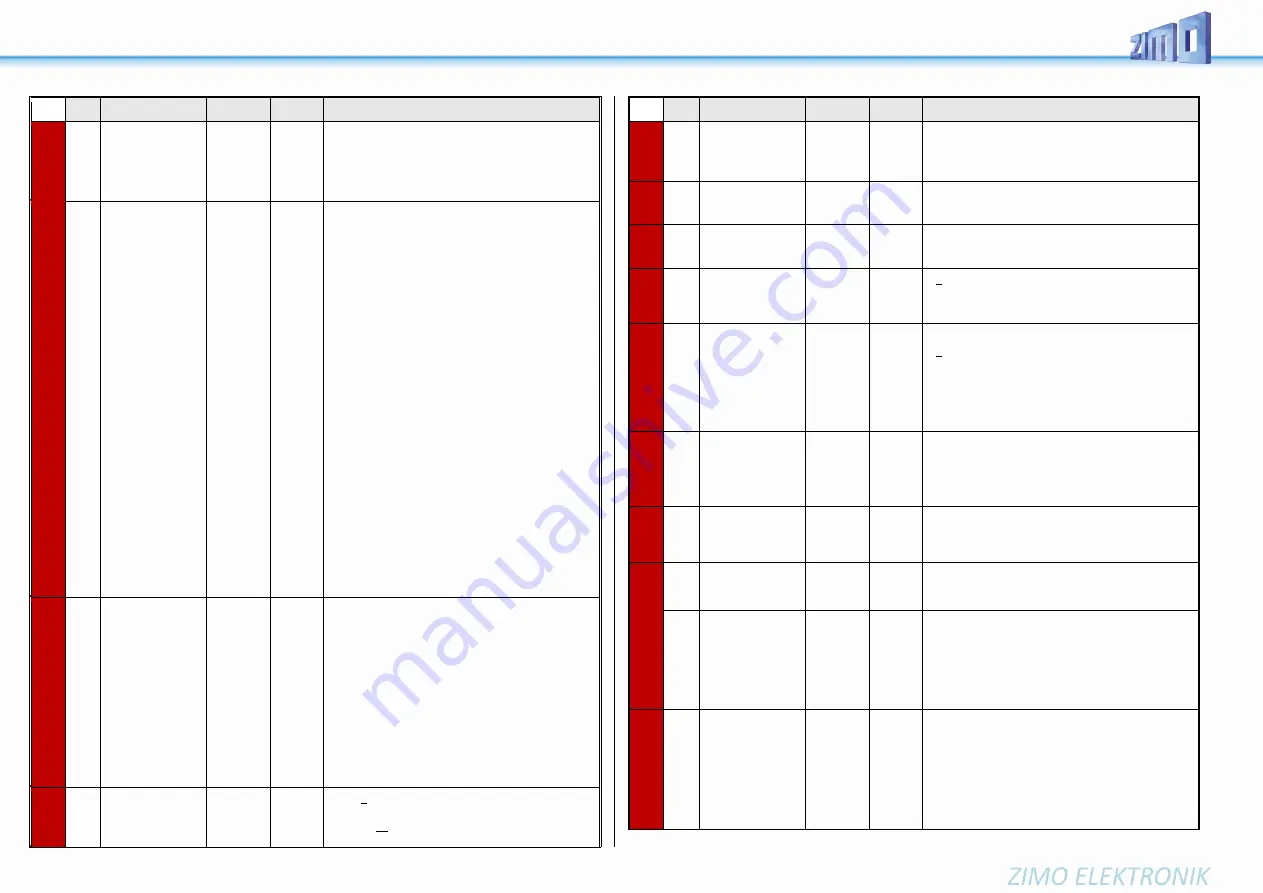
CV
Denomination
Range
Default Description
After reaching the final position (i.e. after "Panto lift") the
Panto should move slightly up and down a few more
times. CV #178 sets the amplitude of this oscillation
(more precisely the first one)
= 0: no oscillation
= 50: sensible initial setting, vary from there.
3.25
#181
#182
#183
#184
Servo 1
Servo 2
Servo 3
Servo 4
Function assignment
NOTE
:
If a servo control line
shares its connec-
tion with another
function (e.g. SUSI
or input) for optional
use, a value >0 in
CV #181, #182, ...
means switching to
servo control line.
This concerns with
"small" decoders
(track N ... H0) the
"official" SUSI pins,
which are switched
to servo with CVs
#181, #182 (SUSI
no longer present),
with MS950, MS955
servos 3 + 4, with
MS990 7 + 8.
0 - 28
90 - 97
101-114
0
0
0
0
= 0: Servo not in operation
= 1: Single-key operation with F1
= 2: Single-key operation with F2
and so on..
= 28: Single-key operation with F28
= 90: Servo dependent on loco direction
forward = servo left; reverse = servo right
= 91: Servo dependent on loco direction and standstill
i.e. Servo on the right at standstill and direction
forward, otherwise servo on the left
= 92: Servo dependent on loco direction and standstill
i.e. Servo on the right at standstill and direction
backwards, otherwise servo on the left
= 93: Servo dependent on standstill or cruising
i.e. Servo on the right at standstill, servo on the left
at cruising; direction without effect.
= 94: refers to function "Panto1" which is
configured in CV#186.
= 95: …"Panto2" configured in CV#187
= 96: …"Panto3" configured in CV#188
= 97: …"Panto4" configured in CV#189
= 101: Two-key operation F1 + F2
= 102: Two-key operation F2 + F3
and so on..
= 111: Two-key operation F11 + F12
= 112: Two-key operation F3 + F6
= 113: Two-key operation F4 + F7
= 114: Two-key operation F5 + F8
(Two-key mode as defined with CV #161, Bit 2)
= 201 - 208: Events 1 - 8 from scripts or sound
3.25
#185
Special assignment
for live steam en-
gines
0
= 1: Steam loco with one servo in operation;
Speed and direction of travel by slider, center
position means stop.
= 2: Servo 1 proportional on speed regulator
Servo 2 for direction.
= 3: like 2, however: Direction-servo is automatically in
“neutral” if speed is 0 and F1 = ON;
At speed step > 0:
If direction-servo is engaged.
NOTE
to CV #185 = 2 or 3:
Servo 1 is adjustable with CV #162, #163 (end-
positions), by using the corresponding values, it is
also possible to change the direction.
Servo 2 is adjustable with CV #166, #167.
3.25
#186
#187
#188
#189
"Panto1"
"Panto2"
"Panto3"
"Panto4"
0
Bit 7 = 0: Not sound-dependent
= 1: Sound-dependent
Bit 6 - 5 = 00: direction independent,
= 01: only if loco drives forward
CV
Denomination
Range
Default Description
= 10: only if loco drives backwards
= 11: only if F-key is turned off
Bit 4 - 0: to Activate
00001 = F1 00010 = F2 00011 = F3
, …
3.21
#190
Brighting-up time
for effects 88, 89
and 90
0 – 100
101-200
201-255
0
The range 0 -100 corresponds to 0 - 1 sec (10ms/value)
101 – 200 1 – 100s (1s/value)
201 – 255 100 – 320s (4s/value)
3.21
#191
Dimming time
for effects 88, 89
and 90
0 – 100
101-200
201-255
0
The range 0 - 100 corresponds to 0 - 1 sec (10ms/value)
101 – 200 1 – 100s (1s/value)
201 – 255 100 – 320s (4s/value)
3.10
#193
ABC - commuting
with stopping times
in reverse loops
0,
1 - 255
0
= 0: no commuting on ABC basis
= 1 - 255: Stopping period (in sec) in the ABC stopping
(=turnaround) sections at the end of the commuting
distance.
3.10
#194
ABC - commuting
with additional
pit stops
0,
1 - 254,
255
0
Only as commuting if CV #193 = 1 - 255
= 0: Commuting without pit stops (see above)
= 1 - 254: Commuting with pit stops
(terminal loops by ABC slow-speed sections,
pit stops defined by ABC stopping sections)
Stopping period (in sec) in the pit stops
= 255: as above but permanent stop in pit stops
(until stop is cancelled).
3.24
#201
Alternative (clearer,
preferred for new
projects) "SUSI" us-
age
0, 11,
22, 33, 44,
55
0
= 11: SUSI pins as logic level outputs (see above)
= 22: SUSI pins as reed inputs
= 33: SUSI pins as servo control lines
= 44: SUSI pins as "SUSI pins" (same as 0)
= 55: SUSI pins as I2C bus.
3.24
#202
If decoder (large
scale decoder) has
two "SUSI" connec-
tions
0, 11,
22, 33, 44,
55
0
As above (CV #201), but for second SUSI connection;
there, however, CV #202 is the only setting option, not
just the alternative).
3.24
#203,
#204
Use of the
inputs IN1 & IN2,
or IN3 & IN4
Ones and
tens 0, 1, 2,
4
0
= 11: both "IN"s as logic level outputs (see above)
= 22: both "IN"s as logic level ("reed") inputs
= 04: first of the two "IN"s as input for axis detector
3.3
#248
#249
Bootloader
version and subver-
sion
Read only
-
Reading out these CVs provides the version and subver-
sion of the bootloader currently on the decoder (boot-
loader = program to load the actual software).
3.2
#250
#251
#252,
#253
Decoder-ID,, thereof
CV #250 and
CV #251 (Bits 7- 4)
= Decoder-Type
(See chapter 1,
types) CV #251 (Bits
3 - 0) and CV #252
and #253 = serial
number
Read only
-
The decoder ID (serial number) is automatically entered
during production: The first byte and half of the second
byte denotes the decoder type; the rest contain a serial
number.
The decoder ID is primarily used for automatic address
assignment when an engine is placed on the layout track
as well as in combination with the “load code” for “coded”
sound projects (see CVs #260 - #263).





















































