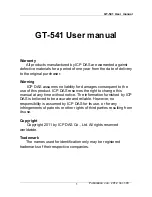
6.6 Example for setting of an ECblue
Byte
(1) Dummy
(2) Accessle-
vel
(3) D1 Off
(4) Control-
mode
(5)Target
speed value
0
0x01
0x02
0x03
0x04
0x05
1
0x00
0x06
0x06
0x06
0x06
2
0x00
0xF7 (=247)
0xF7 (=247)
0xF7 (=247)
0xF7 (=247)
3
0x00
0x06
0x06
0x06
0x06
4
0x00
0x00
0x00
0x00
0x00
5
0x00
0x00
0x0E (=14)
0x04
0x02
6
0x00
0x00
0x00
0x00
0x00
7
0x00
0x0A (=10)
0x00
0x01
0xC8 (=200)
8
0x00
0x00
0x00
0x00
0x00
9
0x00
0x00
0x00
0x00
0x00
The following example (for address 247) shows the setting of an ECblue, setting of
speed to 200 rpm.
1. At
fi
rst send an empty "dummy" packet to activate the device.
2. Set PIN-Accesslevel to Level 2: Register h0, Value 10 (Level 2).
3. Switch function for D1 to "OFF": Register h14, value 0 (enable deaktivated)
4. Then we set the control mode: Register h4, value 1 (absolute speed).
5. Finally we set the desired nominal speed: Register h2, value 200 (speed value).
Information
•
The points 1 - 4 are made only once, register = NV (non volatile).
•
To change the speed or to write only point 5 must be carried out.
•
The internal address is permanently set to 247. If you send an invalid packet, you will
not receive a reply (no changing of input data).
•
Please note that if communication to the module is interrupted, then the motor will
behave as follows:
–
a/ Watchdog deactivated (h17 = 0), the motor will continue to turn at the last speed.
–
b/ Watchdog activated (e.g. h17=0x0503), the motor will change to the speed
de
fi
ned in h5. I.e. if h5=0, the motor will stop.
•
If communication is re-established, you will see the last values in the input data.
Operating Instructions
NETcon
D-G-64NE
Communication
L-BAL-E273-GB 1631 Index 001
Part.-No.
17/27