





























20
5.3
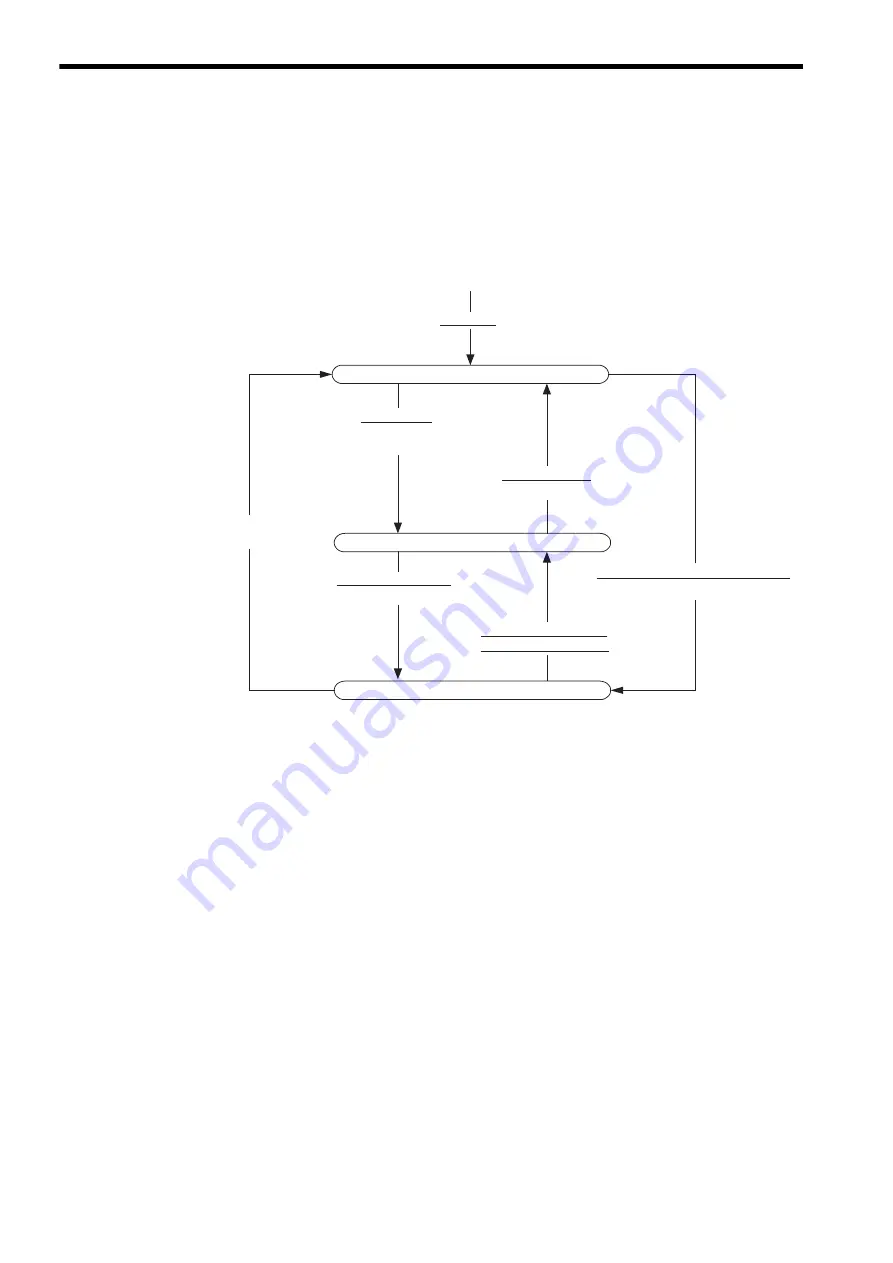
Communications Phases
The SI-T changes status as described here when a command code or fault is received from
the master.
For details on MECHATROLINK communications phases, refer to the
High-speed Field
Network MECHATROLINK System User’s Manual
(SIE-S800-26.1).
Phase 1: Initial status after power ON
Operation proceeds with a default transmission cycle of 2 ms. The transmission cycle is
changed to the time indicated in the synchronous frame when a CONNECT command is
received from the master. Then the phase moves to phase 2 or phase 3 after a response to the
CONNECT command is returned.
Even if a transfer fault is detected in phase 1, no fault notification is provided.
Phase 2: Asynchronous communications
All SI-T commands can be used. Phase 2 starts to count the watchdog timer in the commu-
nications frame. The phase moves to phase 3 when a SYNC_SET command is received, and
it moves to phase 1 when a DISCONNECT command is received.
Phase 3: Synchronous communications
Watchdog timer faults in the communications frame are detected. If the DISCONNECT
command is received, the phase moves to phase 1. If a reception fault or a watchdog timer
fault is detected, the phase moves to phase 2.
Power ON
Phase 1 (Initial status)
Phase 2 (Asynchronous communications status)
Phase 3 (Synchronous communications status)
Connecting
CONNECT command
(Asynchronous communications)
Set Synchronization
(SYNC_SET command)
Communications fault
(Watchdog timer fault)
Connecting: CONNECT command
(Synchronous communications)
Disconnecting:
DISCONNECT command
Disconnecting:
DISCONNECT command







































































