





























INSTALLATION
MOTO
MAN
4-33
ArcWorld IV-6200 XHD DR2C System Manual
4.15
Installing the Operator Station
Motoman recommends anchoring the operator station to the floor. To install the
operator station, proceed as follows:
1. Unload operator station from shipping platform.
2. Carefully remove protective plastic wrapping from operator station.
3. Inspect operator station for shipping damage.
NOTE:
If damage is found, notify shipper immediately.
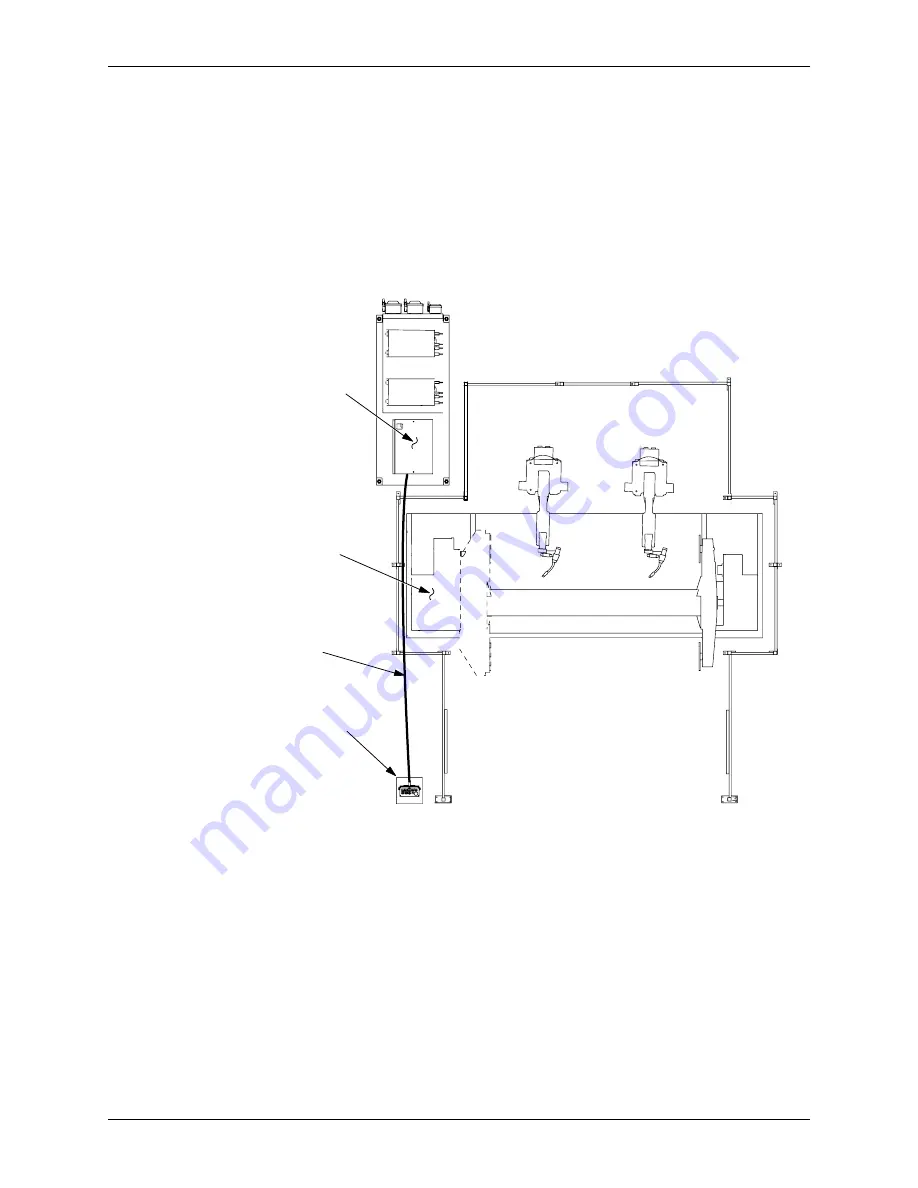
4. Place operator station outside the fence on the floor (see Figure 4-37).
Figure 4-37 Operation Station Installation
5. Insert a 1/4-inch concrete drill bit through the center of four holes in operator
station base and drill holes for anchors.
6. Vacuum concrete dust from holes.
7. Secure operator station to floor using customer-supplied anchors.
4.15.1
Connecting the Operator Station
The operator station cable is shipped in an accessories box. To install the operator
station cable, proceed as follows:
1. Unpack the operator station cable (labeled CA21) and inspect for damage.
NOTE:
If damage is found, notify shipper immediately.
OPERATOR
STATION
OPERATOR
STATION
CABLE
CONTROLLER
HEADSTOCK






































































