





























Application Overview 2-15
Drive Command and Control
This section describes the network variables used to command and control the drive. Refer to the appropriate Technical Manual for additional
information.
#
Run/Stop Command – nviDrvSpeedStpt
This network variable controls the run/stop command to the drive, as described below. The drive must be configured for a network Run/Stop
Command (
nciOpModeRun
= 2
) for this input to control the drive.
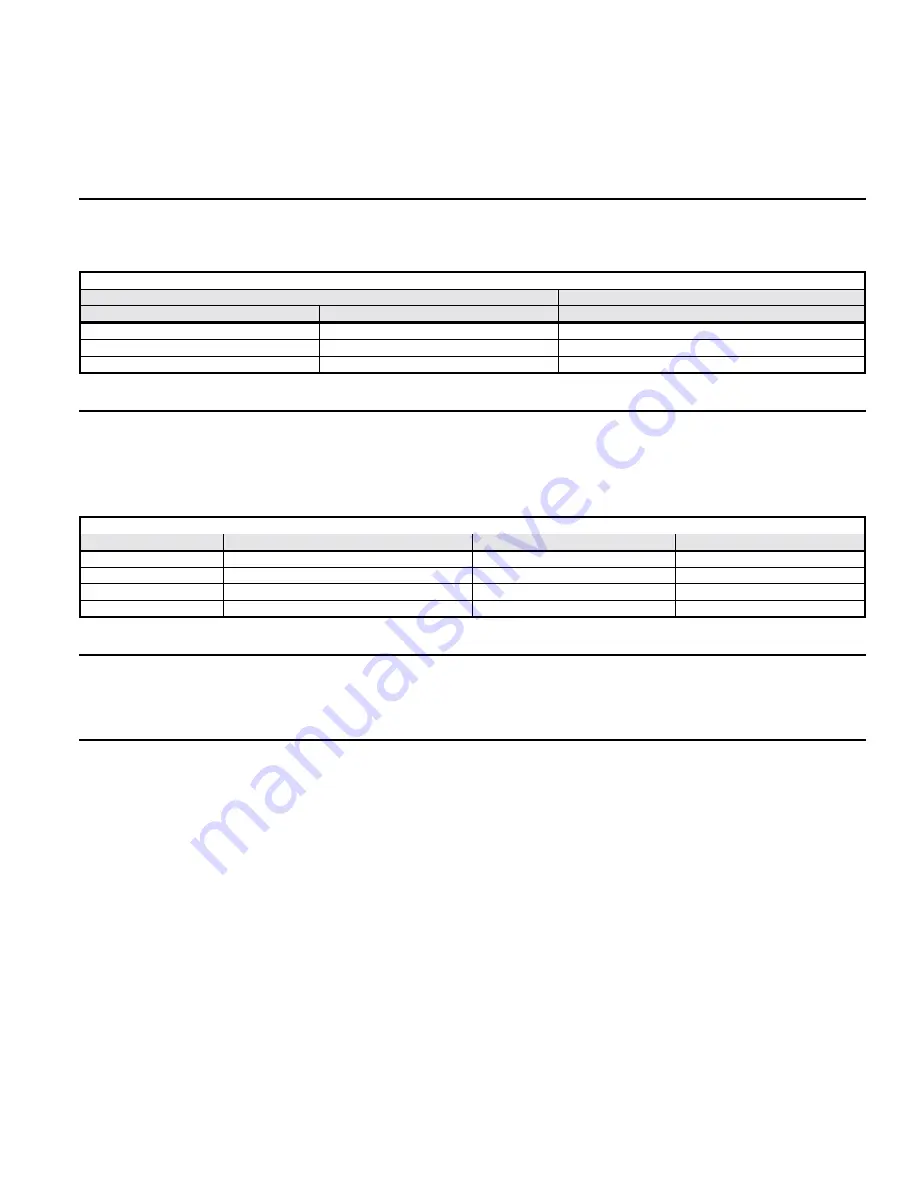
Table 2.18 - Run/Stop Command – nviDrvSpeedStpt
nviDrvSpeedStpt
Run/Stop Command
State
Value
0 don’t
care
Stop
1 0
Run
1 >
0
Run
#
Speed Setpoint - nviDrvSpeedStpt, nviDrvSpeedScale
These two network variables are used together with
nciNmlFreq
to control the speed setpoint, as follows:
Speed Setpoint =
nciNmlFreq
*
nviDrvSpeedStpt.value
*
nviDrvSpeedScale
For example:
Table 2.19 - Speed Setpoint - nviDrvSpeedStpt, nviDrvSpeedScale
nciNmlFreq
nviDrvSpeedStpt.value
nviDrvSpeedScale
Frequency Setpoint
60 Hz
100%
100%
60 Hz
60 Hz
100%
75%
45 Hz
60 Hz
75%
50%
22.5 Hz
50 Hz
60%
35%
10.5 Hz
#
Reverse Command - nviDrvSpeedScale
This network variable is used to reverse the direction of the motor. A negative value for
nviSpeedScale
will cause the motor to reverse direction.
#
Fault / Fault Reset Control - nviOpCommands
Bit 0
of this network variable is used to command an external fault. Commanding this bit to a ‘
1
’ will fault the drive and bring it to a controlled
stop. ‘
EF0
’ is annunciated on the digital operator.
Bit 1
of this input variable is used to reset the fault state of the drive. If no fault conditions exist, the fault state of the drive will be reset
immediately upon receipt of this command. If fault conditions persist, the reset command remains latched until all fault conditions are cleared, at
which time the fault state is reset. The fault state of the drive may also be reset by issuing a
RQ_CLEAR_ALARM
mode request to the node.
Summary of Contents for CIMR-E7 series
Page 1: ...LONWORKS Option Technical Manual Models CIMR E7 P7 F7 and G7 Document Number TM AFD 20 ...
Page 5: ...iv This page intentionally left blank ...
Page 7: ...Installation 1 2 This page intentionally left blank ...
Page 9: ...Installation 1 4 This page intentionally left blank ...
Page 19: ...Application Overview 2 2 This page intentionally left blank ...
Page 38: ...Diagnostics 3 2 This page intentionally left blank ...
Page 40: ...Diagnostics 3 4 This page intentionally left blank ...





















































