




























33-
9.2
Position sensors
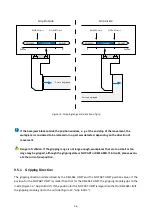
The gripping module has an integrated position measuring system with which the position of the base jaws
is measured relatively. The position value corresponds to the distance between the two base jaws, with the
inner stop corresponding to the value 0 mm. Figure 11shows the relationship between position value and
position of the base jaws. The current position value is transmitted in the cyclic process data.
Figure 11: Position value of the CLG 30-006
9.3
Reference Run
Due to the relative position measuring, the finger position is yet unknown when the gripping module is
switched on. The module must be referenced before it can execute movement commands. During the refer-
ence run, the gripping module moves the base jaws to the outer stop with a defined force and speed and
uses the position reached as a reference value from then on.
During the reference run, keep the traversing range of the fingers free in order to avoid collisions
and incorrect referencing.
If an individual application makes it impossible to move the base jaws to the outer limit, e.g. because a colli-
sion with the workpiece or the environment would occur, the referencing direction can be reversed as de-
scribed in chapter 8.2.2.1and the inside stop can be used instead.