























AlphaBot 2 User Manual
9
share awesome hardware
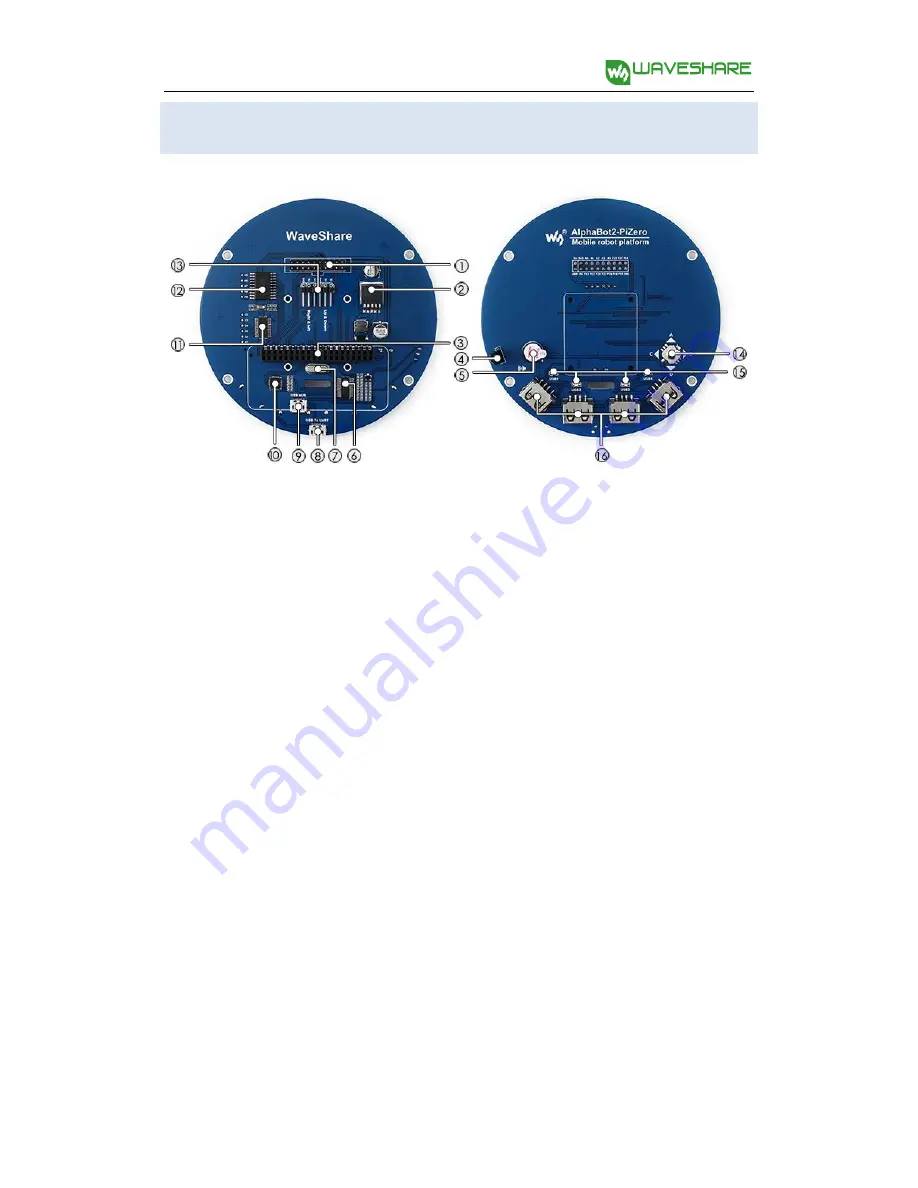
AlphaBot2-PiZero
1.
AlphaBot2 control interface: for connecting AlphaBot2-Base
2.
LM2596: 5V voltage regulator
3.
Raspberry Pi interface: for connecting Raspberry Pi Zero/Zero W
4.
IR receiver
5.
Buzzer
6.
FE1.1S: USB HUB chip
7.
12M crystal
8.
USB TO UART: easy for controlling the Pi via UART
9.
USB HUB interface: extends the USB port of Raspberry Pi Zero/Zero W
10.
CP2102: USB TO UART converter
11.
PCA9685: servo controller, make it more smoothly to rotate the pan head
12.
TLC1543: 10-bit AD acquisition chip, allows the Pi to use analog sensors
13.
Servo interface
14.
USB indicators
15.
USB ports: more USB capability







































































