


















Watson Industries, Inc.
SPS-P230 Rev A 10/17/2017
4
Y
Servo System
The Servo System is built around a rugged pan and tilt mechanism. This is a high-resolution digital
system that uses high quality, wide bandwidth, low noise, and solid-state gyros. The whole system
is user configurable to adapt to a wide range of payloads and requirements.
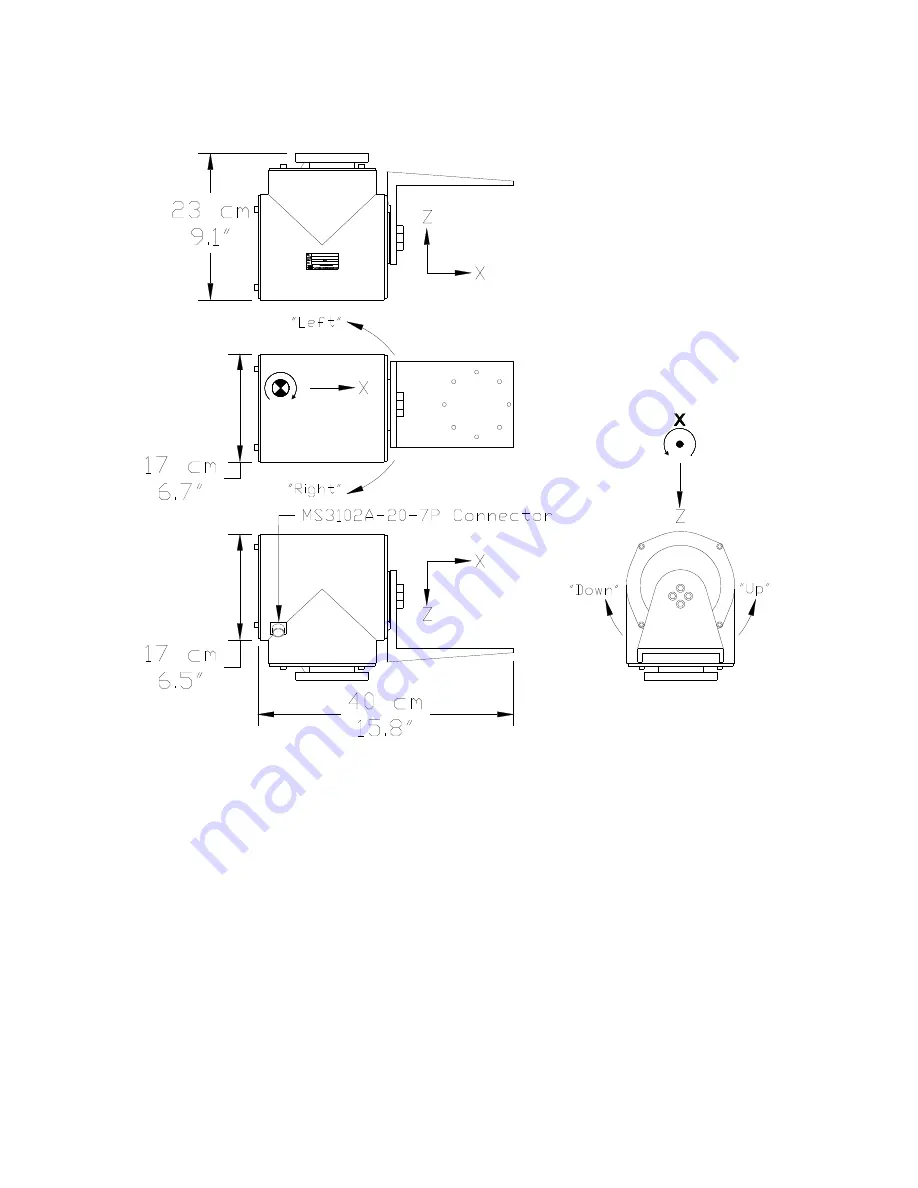
Figure 1 Two-axis gyro Stabilized Platform installation
Each axis uses a servomotor, which drives the platform through an anti-backlash gear, a precision
potentiometer for positional measurements, and a pair of limit stops. The anti-backlash gear
minimizes the backlash from platform motions to less than 10 Arc Seconds. Furthermore, Watson
Industries has installed two gyros and a triaxial accelerometer that are used to calculate corrective
commands to the drive motors.
The two gyros are rugged vibrating-structure gyroscopes, whose angular rate signals are converted
from analog to 16-bit digital form. The effects of temperature variation on the DC bias of the gyros
are digitally corrected.
The micro controller assesses the desired motion of the platform based on joystick commands
received through the RS-422 serial link from the Joystick Controller. It then compares this desired
motion against the real motion of the platform, sensed by the gyros and accelerometers, developing
a rate error value. A servo-control system uses the angular rate and integral of the angular rate to







































































